




 具體成交價以合同協議為準
具體成交價以合同協議為準

¥面議

上海朕鋅電氣設備有限公司
 免費會員
免費會員您現在的位置: 上海朕鋅電氣設備有限公司>>西門子PLC>> 6FC5251-0AF01-0AA0西門子6FC5251-0AF01-0AA0
產品介紹
西門子6FC5251-0AF01-0AA0
上海朕鋅電氣設備有限公司在經營活動中精益求精,具備如下業務優勢:
上海朕鋅*低價銷售西門子PLC,200,300,400,1200,西門子PLC附件,西門子電機,西門子人機界面,西門子變頻器,西門子數控伺服,西門子總線電纜現貨供應,咨詢系列產品,折扣低,貨期準時,并且備有大量庫存. *有效
西門子數控伺服系統:802C S、802D SL、810D DE、820D SL、840C CE、840D DE、840D SL、840Di SL、S120數 控 系 統、數 控 伺 服 驅 動 模 塊、控制 模 塊、電 源模 塊、備 品 備 件 等。
本公司產品質量按西門子原廠質量標準,產品質保一年,按西門子原廠包裝標準,西門子原裝 *,按廠家執行標準,需方收到貨后七日內可提出異議!!!
我們賣的不是價格。賣的是誠信賣的是品質
SIEMENS西門子上海朕鋅電氣設備有限公司
*,質量保證,保修一年,提供技術及售后服務,價格公道合理
: 鄭鑫
:
: 請備注鄭鑫收 謝謝
在線商務:1620718203
公司:www.zhenxindianqi。。cn
郵 箱:
1.液壓伺服系統簡介
液壓伺服系統以其響應速度快(相對于機械系統)、負載剛度大、控制功率大等*的優點在工業控制中得到了廣泛的應用。而電液伺服系統是通過使用電液伺服閥,將小功率的電信號轉換為大功率的液壓動力,從而實現了一些重型機械設備的伺服控制。
1.1 液壓伺服系統的組成
液壓伺服系統主要由以下幾部分組成(如圖 1):
- 儲油缸
- 油泵
- 比例換向閥
- 液壓缸
- 測量反饋系統
- 控制系統
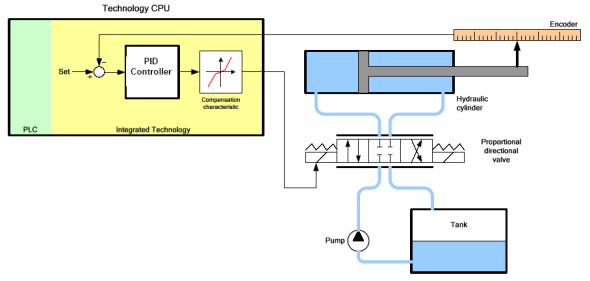
圖1. 液壓伺服系統
使用TCPU控制液壓伺服系統時,TCPU就是該系統中的控制器;TCPU可以通過脈沖或者模擬量輸出來控制比例換向閥的開度和方向從而控制液壓缸的運動方向和速度;測量反饋系統可以由設備編碼器或者模擬量信號通過IM174接口模板或模擬量輸入模板將信號反饋給TCPU。
1.2 液壓伺服系統與電氣伺服系統區別
控制電氣伺服系統時,執行機構(通常為伺服電機)能夠根據速度給定改變運行速度,響應快,動態特性好,給定與輸出之間呈線性比例關系;而液壓伺服系統由其液壓油的物理特性決定了其響應速度和動態特性都較低,而且在液壓伺服系統啟動、停止以及換向時都會出現大滯后性,這樣就導致輸出給定與執行速度之間的關系并不是線形的(如圖 2),這樣,一旦我們還以控制線性電氣軸的模型來控制非線性液*時,速度會非常不穩定,而且位置閉環會不停的修正由速度不穩定所帶來的位置偏差,這時液壓執行機構就會來回跳動或者抖動,造成定位誤差大甚至損壞機械設備。所以我們在控制液壓伺服系統時就應該先了解該系統的給定與輸出之間的關系,確定補償曲線來保證執行機構平穩運行。
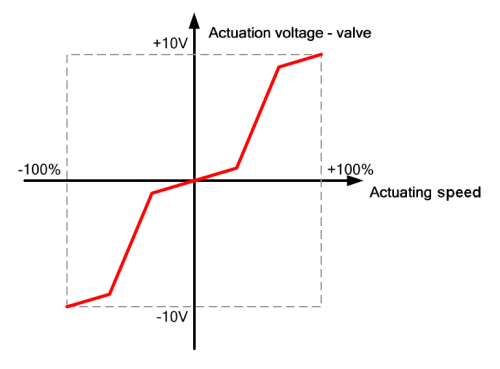
圖 2. 給定與實際速度的關系
在 TCPU 中,補償曲線可以由多種方法來確定,例如 S7T Config 中的 Trace 工具,根據輸出不同的給定值和實際的速度值來確定差補點,將差補點的值以表格的方式添入到 Cam Disk (凸輪盤)中。
本文主要介紹使用自動獲得補償曲線功能塊 FB 520“GetCharacteristics” 和 FB 521“WriteCamData”來確定差補曲線。
2.系統結構及軟硬件要求
2.1 系統結構
本系統的給定和反饋均使用高性能ET200M帶AI/AO模板來實現(如圖 3):
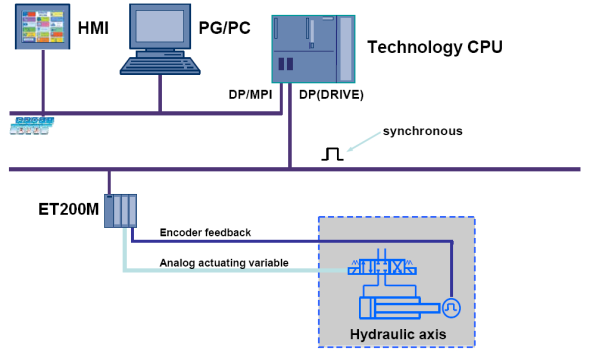
圖 3. 系統結構圖
2.2 硬件及軟件要求
| 名稱 | 數量 | 訂貨號 |
| CPU 315T-2 DP | 1 | 6ES7315-6TG10-0AB0 Or 6ES7315-6TH13-0AB |
| Firmware: V2.6 | ||
| Or CPU 317T-2 DP | 1 | 6ES7317-6TJ10-0AB0 Or 6ES7317-6TK13-0AB0 |
| Firmware: V2.6 | ||
| Micro Memory Card 4MB | 1 | 6ES7953-8LM20-0AA0 |
| Interface module IM174 | 1 | 6ES7174-0AA00-0AA0 |
| Or ET200M / ET200S | 1 | 6ES7 153-2BA02-0XB0 or 6ES7 151-1BA02-0AB0 |
| STEP 7 | 1 | 6ES7810-4CC08-0YA7 Version: V5.4 以上 |
| S7 Technology | 1 | 6ES7864-1CC41-0YX0 Version: V4.1 以上 |
表 1. 硬件及軟件要求
3.項目配置過程:
3.1 硬件組態
在 SIMATIC 管理器中創建新的項目并添加一個 SIMATIC 300 站點。根據實際硬件配置硬件組態,本例中使用模擬量輸入輸出作為給定和反饋信號。組態模擬量輸入輸出并分配 I/O 地址(圖 4);
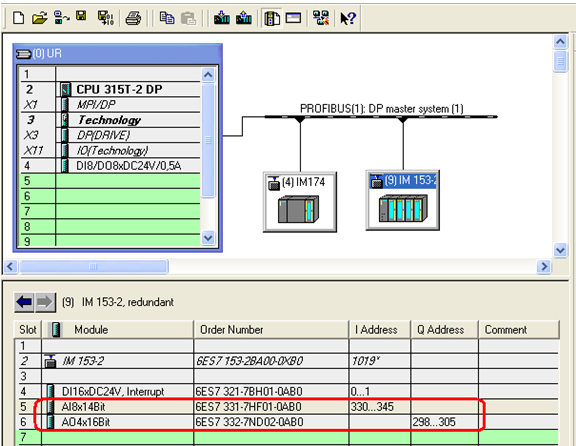
圖 4. 硬件組態
3.2 在 S7T Config 中配置液*
在 S7T Config 的瀏覽器中,雙擊“插入軸”(Insert axis)(圖 5)
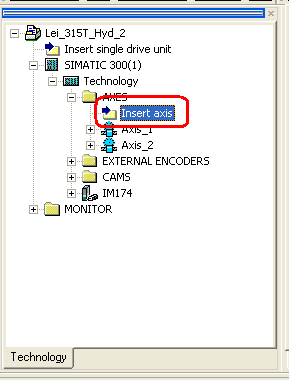
圖 5. 插入液*
在“常規”(General) 選項卡中,選擇“速度控制”(Speed control) 和“定位”(Positioning) 控制然后打開軸向導;
在軸類型話框中,選擇“液壓”(Hydraulic) 軸類型。 將閥類型定義為“Q 閥”(Q valve)(圖 6)。
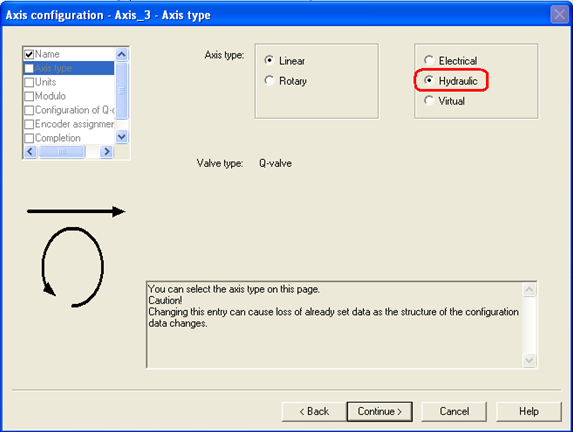
圖 6. 選擇軸的類型
配置完液*的物理單位及模度后,進入到輸入輸出的配置界面,并選擇其輸出方式模擬量輸出模板(圖7 );
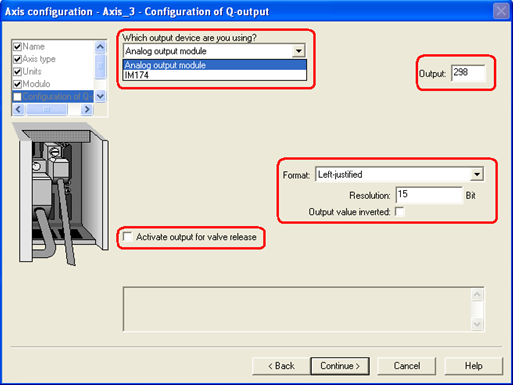
圖 7. 選擇輸出方式
選擇輸出設備為模擬量輸出模塊,填入相應參數:
- Output:模擬量輸出地址
- Format:ET200M/ET200S選擇Left-justified
- Resolution:模擬量模板的輸出精度(不含符號位)
點擊繼續進入到位置反饋參數界面,填入使用的模擬量輸入的地址(圖 8):
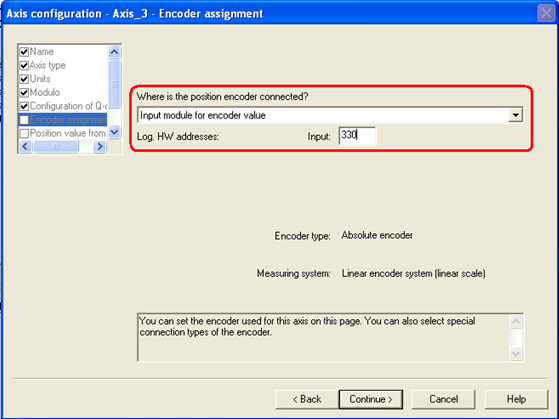
圖 8. 選擇反饋方式
點擊繼續,進入到位置反饋參數分配界面(圖 9):
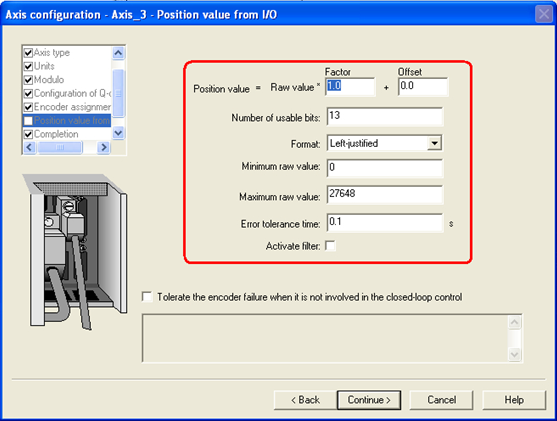
圖 9. 反饋參數分配
相關輸入參數:
- Factor/Offset:輸入系數及偏置
- Usable bits: 模擬量模板的輸入精度(不含符號位)
- Minimum value:輸入的zui小值
- Maximum value:輸入的zui大值
分配完所有參數,單擊“完成”(Finish) 退出軸組態對話框。
3.3 建立補償曲線凸輪盤
根據前文所提到的,液壓伺服系統需要確定一條補償曲線來線性化輸出變量與液*速度之間的關系。在 TCPU 中通過使用凸輪盤(Cam Disk)工藝對象來確定補償曲線,液壓伺服軸的補償曲線反映了液壓比例閥輸出給定與液*速度之間的對應關系。由于本文使用功能塊 FB 520 “GetCharacteristics” 和 FB 521“WriteCamData” 來自動獲得補償曲線,所以需要建立兩個凸輪盤(Cam Disk)來確定補償曲線。其中*個凸輪盤是用來測量、尋找補償點,而測量后的結果會寫入到另外一個凸輪盤,這個被寫入的凸輪盤也就是當前液壓伺服系統的zui終補償曲線。
在 CAMS 下面建立兩個凸輪盤,分別取名為:Cam_Profile 與 Cam_Reference,并填入兩個差補點描繪一條輸出給定與執行速度間的參考關系曲線,如圖 10:
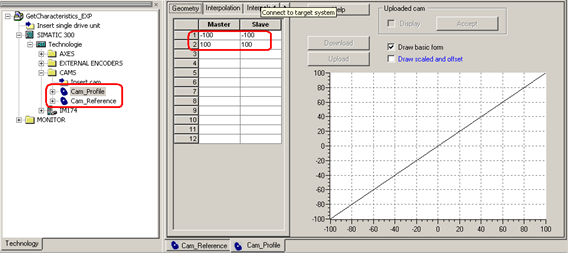
圖 10. 建立補償曲線凸輪盤
做好以上工作后,將 S7T-Config 存盤編譯,并將組態好的軸和凸輪盤等工藝對象生成相應的工藝對象數據塊,并下載到 TCPU。本例中工藝對象數據塊對應為:
- Axis:DB3;
- Cam_Reference: DB4;
- Cam_Profile: DB5;
4.編寫用戶程序
4.1 使用 FB 520 和 FB 521 自動獲得補償曲線
FB 520 “GetCharacteristics” 和 FB 521“WriteCamData”兩個功能塊并沒有在 S7-Tech 庫中提供,所以需要到以下鏈接下載例子項目,并將項目中的FB520和FB521復制到自己的項目中來。
下載鏈接:27731588
4.2 FB 520 和 FB 521 的功能介紹
4.2.1 FB 520 “GetCharacteristics”
通過該功能塊,系統能夠執行測量并得到當前液壓系統的補償曲線,并將相應的Cam Disk激活為當前液壓系統的Profile。其內部調用結構如圖 11:
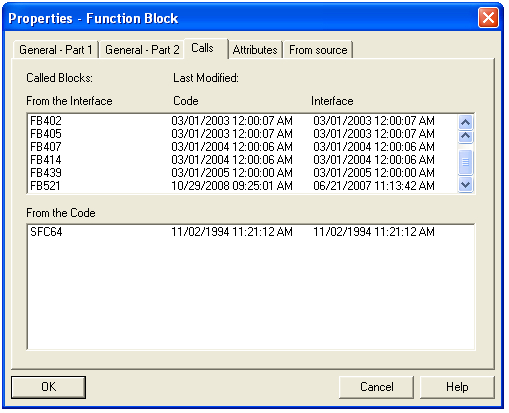
圖 11. FB 520 結構
4.2.2 FB 521 “WriteCamData”
該功能塊能夠將測量的補償曲線寫入到相應的Cam Disk中。其內部調用結構如圖 12:
 西門子6FC5251-0AF01-0AA0
西門子6FC5251-0AF01-0AA0
圖 12. FB 521 結構
由這兩個功能塊的結構圖可以看出,其內部調用了很多S7-Tech里面的功能塊,所以需要將這些功能塊復制到當前的項目中來。而且,可以看到在FB520功能塊內部已經調用了FB521,所以只要保證FB 521在項目中存在就可以了,不需要在程序中單獨調用。表 2 為FB520,FB521所使用到的S7-Tech功能塊:
| PLC-Open FB | 功能 |
| FB 402 “MC_Reset” | 復位可能出現的錯誤 |
| FB 405 “MC_Halt” | 停止軸運動 |
| FB 407 “MC_WriteParameter” | 寫系統參數 |
| FB 414 “MC_MoveVelocity” | 使軸運動,并可改變其運行速度 |
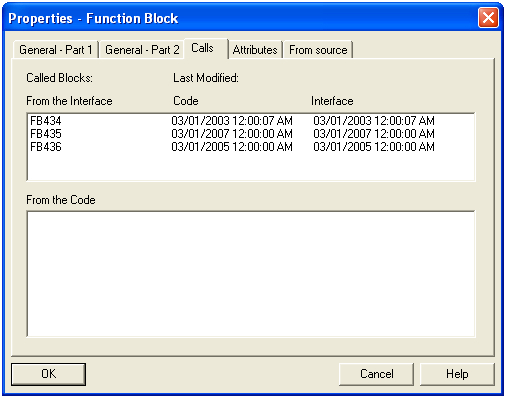
| FB 434 “MC_CamClear” | 刪除一個凸輪盤中的所有插補點 |
| FB 435 “MC_CamSectorAdd” | 插入一個新的插補點到凸輪盤中 |
| FB 436 “MC_CamInterpolate” | 修改凸輪盤的插補點 |
| FB 439 “MC_SetCharacteristics” | 激活一個凸輪曲線作為液壓閥的特性曲線 |
表 2. 使用的 S7-Tech 功能塊
4.2.3 FB520的管腳及其定義(圖 13 及表 3):
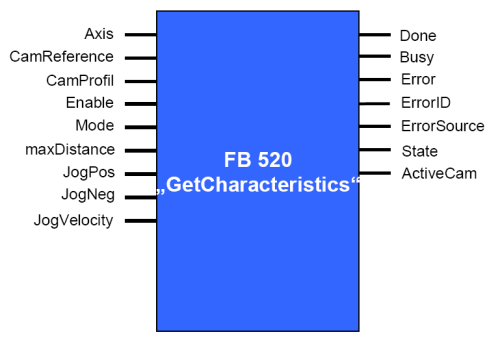
圖 13. FB 520 管腳定義
| 名稱 | 含義 |
| 輸入參數 | |
| Axis | 液*工藝DB號 |
| CamReference | 執行測試時的參考凸輪盤的工藝DB號 |
| CamProfil | zui終要寫入的凸輪盤的工藝DB號 |
| Enable | 使能 |
| Mode | 執行模式 |
| maxDistance | 執行測試時的zui大移動距離 |
| JogPos | 正向點動 |
| JogNeg | 負向點動 |
| JogVelocity | 點動速度 |
| 輸出參數 | |
| Done | 測量完成 |
| Busy | 忙 |
| Error | 有錯誤 |
| ErrorID | 錯誤代碼 |
| ErrorSource | 錯誤源 |
| State | 當前狀態 |
| ActiveCam | 當前執行的凸輪盤的工藝DB號 |
表 3. FB 520 管腳定義
4.3 在OB1中調用FB520(圖 14)
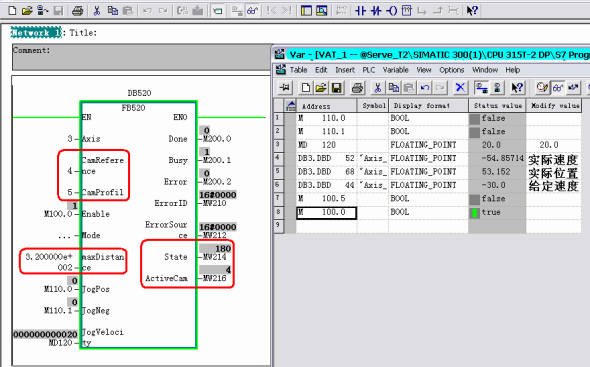
圖 14. 在 OB1 中調用 FB 520
使用步驟:
- 將工藝對象的 DB 號填入到相應的管腳上;
- 通過點動(Jog)管腳,將液*移動到要運行的zui初始位置;
- 在 maxDistance 管腳上填入要執行測量的zui大行程,這里建議填入的行程距離要大于正常運行時的工作行程,但注意不要超過液壓缸的zui大行程;
- 準備工作就緒后,將使能位(Enable)置 1,這時液壓缸會啟動檢測過程,可以通過狀態字(State)觀察當前的執行情況。
- 當測量結束后,完成位(Done)置 1,表示測量工作已經完成,而且測量出來的補償曲線已經寫入到 Cam_Profile 凸輪盤中。
4.4 FB 520 “GetCharacteristics” 的測量原理(圖 15)
- TCPU 通過模擬量輸出將給定發送給液壓閥,并激活其動作;
- 液壓閥開啟后,相應流量的液壓油注入到液壓缸并推動液*運動;
- 液*的移動速度由位置反饋系統檢測并存儲在 TCPU 內;
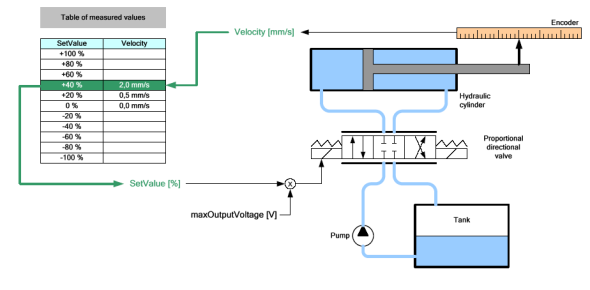
圖 15. FB 520 的測量原理
4.5 FB 520 “GetCharacteristics” 補償曲線的寫入過程(圖 16):
- 當所有位置上的測量值記錄完成后會以凸輪盤的形式存在 TCPU 中;
- 凸輪盤的坐標分別對應的是閥的給定開度和液*的當前速度;
- zui后 TCPU 會執行 FB439 MC_SetCharacteristic 將當前凸輪盤激活為液*的補償曲線。
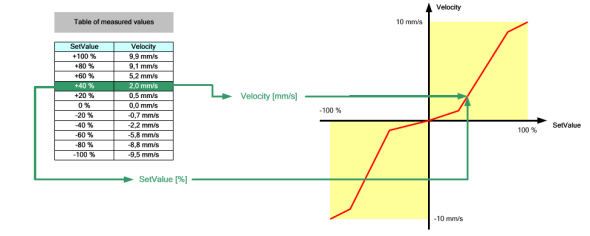
圖 16. 補償曲線的寫入過程
4.6 FB 520 “GetCharacteristics” 執行時的基本步驟
- 初始化 FB 520:
生成的線性參考凸輪盤被激活,并且液*被設置為閉環模式; - 檢測液*的死區:
根據 TCPU 發出的目標給定以及液*的響應時間計算出死區; - 由正方向開始測量補償曲線:
由正方向開始,TCPU 在不同的位置上給出一系列給定速度,并根據反饋速度測量補償點,測量結束后回到初始位置; - 由負方向開始測量補償曲線:
由負方向開始,TCPU 在不同的位置上給出一系列給定速度,并根據反饋速度測量償點,測量結束后回到初始位置; - 寫入并激活測量出的補償曲線:
TCPU 將測量的補償曲線寫入到另外一個凸輪盤,并將其激活為當前液*的zui終償曲線。
4.7 FB 520 “GetCharacteristics” 的 42 種執行狀態(圖 17):
- 0-41:初始化
- 42-44:死區檢測
- 45-47:移動到初始位置
- 50-101:正向檢測
- 110-111:移動到正向zui大位置
- 120-171:反向測量
- 180-181:移動到初始位置
- 190-210:寫入并激活補償曲線
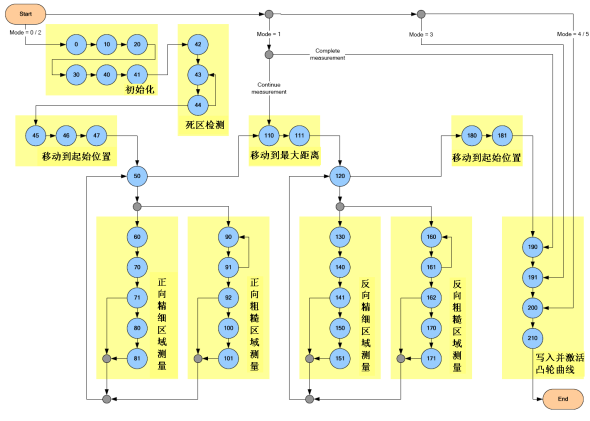
圖 17:FB 520 的42種執行狀態(State)
5.執行結果
在FB520執行自動檢測之后,可以通過在線的方式察看測量出來的補償曲線,如圖 18:
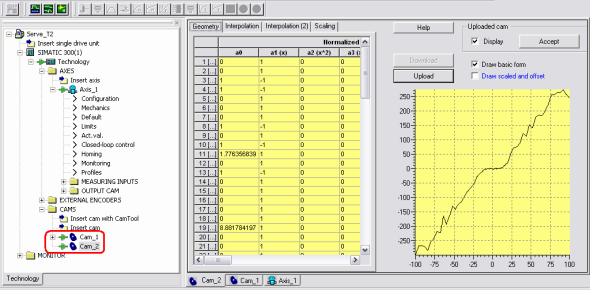
圖 18. 在線察看測量出來的補償曲線
到這里為止,液壓伺服軸的補償曲線已經建立,在 TCPU 中就可以使用其定位功能塊對液*進行控制了,控制器會自動使用補償曲線中的速度對應關系調節輸出。有關更多液*的使用請參考 TCPU 手冊
SINAMICS V90 有兩個模擬量輸入及兩個模擬量輸出信號,模擬量輸入可用于速度及轉矩給定,也可以用于速度及轉矩的限幅。模擬量輸出可以將速度實際值或實際轉矩值等用戶自定義的信號以模擬量的形式輸出。本文詳細介紹了模擬量輸入及模擬量輸出的信號類型及功能設置。
目錄:
1 概述
2 模擬量輸入及輸出信號接線
3 模擬量輸入信號
4 模擬量輸出信號
1 概述
SINAMICS V90 有兩個模擬量輸入及兩個模擬量輸出信號,模擬量輸入可用于速度及轉矩給定,也可以用于速度及轉矩的限幅。模擬量輸出可以將速度實際值或實際轉矩值等用戶自定義的信號以模擬量的形式輸出。本文詳細介紹了模擬量輸入及模擬量輸出的信號類型及功能設置。
2 模擬量輸入及輸出信號接線
V90有兩個模擬量輸入及兩個模擬量輸出信號,接線如圖2-1 所示。

圖2-1 模擬量輸入及輸出接線
3 模擬量輸入信號
SINAMICS V90 支持兩個模擬量輸入。其輸入電壓在不同的控制模式下會有所不同,如表2-1所示。


表2-1 模擬量輸入信號
(1) V90在速度控制模式(S)下模擬量輸入的配置
V90在速度控制模式(S)下模擬量1(AI1)用于速度給定,在調試軟件V-ASSISTANT中進行設置,如圖2-2所示;模擬量2(AI2)可以設置為轉矩極限如圖2-3所示。

圖2-2 速度控制模式(S)下AI1模擬量輸入設置畫面

圖2-3 速度控制模式(S)下AI2模擬量輸入設置畫面
(2) V90在轉矩控制模式(T)下模擬量輸入的配置
V90在轉矩控制模式(T)下模擬量1(AI1)用于速度限制值給定,在調試軟件V-ASSISTANT中進行設置,如圖2-4所示;模擬量2(AI2)可以設置為轉矩給定值,如圖2-5所示。

圖2-4轉矩控制模式(T)下AI2模擬量輸入設置畫面

圖2-5 轉矩控制模式(T)下AI1模擬量輸入設置畫面
4 模擬量輸出信號
SINAMICS V90 支持兩個模擬量輸出。其輸出電壓在不同的控制模式下會有所不同,如表2-2所示。

表2-2 模擬量輸出信號輸出電壓
通過 p29350(選擇 AO1 的信號源) 和 p29351(選擇 AO2 的信號源),這兩個參數可選
擇模擬量輸出的指令源如表2-3所示。
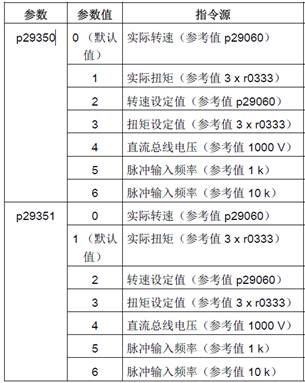
表2-3 模擬量輸出信號信號源
在調試軟件V-ASSISTANT中進行設置,如圖2-6所示;:

圖2-6模擬量輸輸出設置畫面
電源模塊
6ES7 407-0DA02-0AA0 電源模塊(4A)
6ES7 407-0KA02-0AA0 電源模塊(10A)
6ES7 407-0KR02-0AA0 電源模塊(10A)冗余
6ES7 407-0RA02-0AA0 電源模塊(20A)
6ES7 405-0DA02-0AA0 電源模塊(4A)
6ES7 405-0KA02-0AA0 電源模塊(10A)
6ES7 405-0RA01-0AA0 電源模塊(20A)
6ES7 971-0BA00 備用電池
CPU
6ES7 412-3HJ14-0AB0 CPU 412-3H; 512KB程序內存/256KB數據內存
6ES7 414-4HM14-0AB0 CPU 414-4H; 冗余熱備CPU 2.8 MB RAM
6ES7 417-4HT14-0AB0 CPU 417-4H; 冗余熱備CPU 30 MB RAM
6ES7 400-0HR00-4AB0 412H 系統套件包括 2 個CPU、1個H型*機架、2個電源、2個1M 存儲卡、4個同步模塊、2根同步電纜,以及4個備用電池(PS407 10A)
6ES7 400-0HR50-4AB0 412H 系統套件包括 2 個CPU、1個H型*機架、2個電源、2個1M 存儲卡、4個同步模塊、2根同步電纜,以及4個備用電池(PS405 10A)
6ES7 412-1XJ05-0AB0 CPU412-1,144KB程序內存/144KB數據內存
6ES7 412-2XJ05-0AB0 CPU412-2,256KB程序內存/256KB數據內存
6ES7 414-2XK05-0AB0 CPU414-2,512KB程序內存/512KB數據內存
6ES7 414-3XM05-0AB0 CPU414-3,1.4M程序內存/1.4M數據內存 1個IF模板插槽
6ES7 414-3EM05-0AB0 CPU414-3PN/DP 1.4M程序內存/1.4M數據內存 1個IF模板插槽
6ES7 416-2XN05-0AB0 CPU416-2,2.8M程序內存/2.8M數據內存
6ES7 416-3XR05-0AB0 CPU416-3,5.6M程序內存/5.6M數據內存 1個IF模板插槽
6ES7 416-3ER05-0AB0 CPU416-3PN/DP 5.6M程序內存/5.6M數據內存 1個IF模板插槽
6ES7 416-2FN05-0AB0 CPU416F-2,2.8M程序內存/2.8M數據內存
6ES7 416-3FR05-0AB0 CPU416F-3PN/DP,5.6M程序內存/5.6M數據內存
6ES7 417-4XT05-0AB0 CPU417-4,15M程序內存/15M數據內存
內存卡
6ES7 955-2AL00-0AA0 2 X 2M字節 RAM
6ES7 955-2AM00-0AA0 2 X 4M字節 RAM
6ES7 952-0AF00-0AA0 64K字節 RAM
6ES7 952-1AH00-0AA0 256K字節 RAM
6ES7 952-1AK00-0AA0 1M字節 RAM
6ES7 952-1AL00-0AA0 2M字節 RAM
6ES7 952-1AM00-0AA0 4M字節 RAM
6ES7 952-1AP00-0AA0 8M字節 RAM
6ES7 952-1AS00-0AA0 16M字節 RAM
6ES7 952-1AY00-0AA0 64M字節 RAM
6ES7 952-0KF00-0AA0 64K字節 FLASH EPROM
6ES7 952-0KH00-0AA0 256K字節 FLASH EPROM
6ES7 952-1KK00-0AA0 1M字節 FLASH EPROM
6ES7 952-1KL00-0AA0 2M字節 FLASH EPROM
6ES7 952-1KM00-0AA0 4M字節 FLASH EPROM
6ES7 952-1KP00-0AA0 8M字節 FLASH EPROM
6ES7 952-1KS00-0AA0 16M字節 FLASH EPROM
6ES7 952-1KT00-0AA0 32M字節 FLASH EPROM
6ES7 952-1KY00-0AA0 64M字節 FLASH EPROM
開關量輸入模板
6ES7 421-7BH01-0AB0 開關量輸入模塊(16點,24VDC)中斷
6ES7 421-1BL01-0AA0 開關量輸入模塊(32點,24VDC)
6ES7 421-1EL00-0AA0 開關量輸入模塊(32點,120VUC)
6ES7 421-1FH20-0AA0 開關量輸入模塊(16點,120/230VUC)
6ES7 421-7DH00-0AB0 開關量輸入模塊(16點,24V到60VUC)
開關量輸出模板
6ES7 422-1BH11-0AA0 開關量輸出模塊(16點,24VDC,2A)
6ES7 422-1BL00-0AA0 32點輸出,24VDC,0.5A
6ES7 422-7BL00-0AB0 32點輸出,24VDC,0.5A,中斷
6ES7 422-1FH00-0AA0 16點輸出,120/230VAC,2A
6ES7 422-1HH00-0AA0 16點輸出,繼電器,5A
模擬量模塊
6ES7 431-0HH00-0AB0 16路模擬輸入,13位
6ES7 431-1KF00-0AB0 8路模擬輸入,13位,隔離
6ES7 431-1KF10-0AB0 8路模擬輸入,14位,隔離,線性化
6ES7 431-1KF20-0AB0 8路模擬輸入,14位,隔離
6ES7 431-7QH00-0AB0 16路模擬輸入,16位,隔離
6ES7 431-7KF00-0AB0 8路模擬輸入,16位,隔離,熱電偶
6ES7 431-7KF10-0AB0 8路模擬輸入,16位,隔離,熱電阻
6ES7 432-1HF00-0AB0 8路模擬輸出,13位,隔離
功能模板
6ES7 450-1AP00-0AE0 FM450-1計數器模板
6ES7 451-3AL00-0AE0 FM451定位模板
6ES7 452-1AH00-0AE0 FM452電子凸輪控制器
6ES7 453-3AH00-0AE0 FM453定位模板
6ES7 455-0VS00-0AE0 FM455C閉環控制模塊
6ES7 455-1VS00-0AE0 FM455S閉環控制模塊
6DD1 607-0AA2 FM 458-1DP快速處理系統
6ES7 953-8LJ20-0AA0 用于FM458-1DP 基本模板 512KByte(MMC)
6ES7 953-8LL20-0AA0 用于FM458-1DP 基本模板 2MByte(MMC)
6ES7 953-8LM20-0AA0 用于FM458-1DP 基本模板 4MByte(MMC)
6DD1 607-0CA1 EXM 438-1 I/O擴展模板
6DD1 607-0EA0 EXM 448 通訊擴展模板
6DD1 607-0EA2 EXM 448-2 通訊擴展模板
6DD1 684-0GE0 SC64連接電纜
6DD1 684-0GD0 SC63連接電纜
6DD1 684-0GC0 SC62連接電纜
6DD1 681-0AE2 SB10端子模塊
6DD1 681-0AF4 SB60端子模塊
6DD1 681-0EB3 SB61端子模塊
6DD1 681-0AG2 SB70端子模塊
6DD1 681-0DH1 SB71端子模塊
6DD1 681-0AJ1 SU12端子模塊
6DD1 681-0GK0 SU13端子模塊
通訊模板
6ES7 440-1CS00-0YE0 CP440通訊處理器
6ES7 441-1AA04-0AE0 CP441-1通訊處理器
6ES7 441-2AA04-0AE0 CP441-2通訊處理器
6ES7 963-1AA00-0AA0 RS232C接口模板
6ES7 963-2AA00-0AA0 20mA接口模板
6ES7 963-3AA00-0AA0 RS422/485接口模板
6ES7 870-1AA01-0YA0 可裝載驅動 MODBUS RTU 主站
6ES7 870-1AB01-0YA0 可裝載驅動 MODBUS RTU 從站
6GK7 443-5FX02-0XE0 CP443-5基本型通訊處理器,支持Profibus-Fms協議
6GK7 443-5DX04-0XE0 CP443-5擴展型通訊處理器,支持Profibus-DP協議
6GK7 443-1EX11-0XE0 CP443-1 以太網通訊處理器
6GK7 443-1EX41-0XE0 CP443-1 高級以太網通訊處理器
附件
6ES7 960-1AA04-0XA0 冗余系統同步模板(新)近距離同步(10米以內)
6ES7 960-1AB04-0XA0 冗余系統同步模板(新)遠程同步模板(10米到10公里,用同長度的光纜)
6ES7 960-1AA04-5AA0 冗余系統光纖連接電纜(1米)(新)
6ES7 960-1AA04-5BA0 冗余系統光纖連接電纜(2米)(新)
6ES7 960-1AA04-5KA0 冗余系統光纖連接電纜(10米)(新)
6ES7 833-1CC01-0YA5 S7F系統可選軟件包
6ES7 833-1CC00-6YX0 F運行*
6ES7 197-1LA03-0XA0 Y-LINK
6ES7 492-1AL00-0AA0 前連接器
6ES7 400-1TA01-0AA0 主板(18槽)
6ES7 400-1JA01-0AA0 主板(9槽)
6ES7 400-1TA11-0AA0 主板(18槽)鋁板
6ES7 400-1JA11-0AA0 主板(9槽)鋁板
6ES7 401-2TA01-0AA0 CR2主板(18槽)
6ES7 400-2JA00-0AA0 UR2-H主板(18槽)
6ES7 400-2JA10-0AA0 UR2-H主板(18槽)鋁板
6ES7 403-1TA01-0AA0 ER1機架(18槽)
6ES7 403-1JA01-0AA0 ER2機架(9槽)
6ES7 403-1TA11-0AA0 ER1機架(18槽)鋁板
6ES7 403-1JA11-0AA0 ER2機架(9槽)鋁板
6ES7 460-0AA01-0AB0 IM460-0
6ES7 461-0AA01-0AA0 IM461-0
6ES7 468-1AH50-0AA0 連接電纜 (0.75米)
6ES7 468-1BB50-0AA0 連接電纜 (1.5米)
6ES7 461-0AA00-7AA0 終端器
6ES7 460-1BA01-0AB0 IM460-1
6ES7 461-1BA01-0AA0 IM461-1
6ES7 468-3AH50-0AA0 468-3連接電纜 (0.75米)
6ES7 468-3BB50-0AA0 468-3連接電纜 (1.5米)
6ES7 460-3AA01-0AB0 IM460-3
6ES7 461-3AA01-0AA0 IM461-3
6ES7 468-1BF00-0AA0 468-1連接電纜(5米)
6ES7 468-1CB00-0AA0 468-1連接電纜(10米)
6ES7 468-1CC50-0AA0 468-1連接電纜(25米)
6ES7 468-1CF00-0AA0 468-1連接電纜(50米)
6ES7 468-1DB00-0AA0 468-1連接電纜(100米)
6ES7 461-3AA00-7AA0 終端器
6ES7 463-2AA00-0AA0 IM463-2接口模塊
6ES7 964-2AA04-0AB0 IF-964 DP接口模塊
相關產品


