






¥面議

上海朕鋅電氣設(shè)備有限公司
 免費(fèi)會(huì)員
免費(fèi)會(huì)員您現(xiàn)在的位置: 上海朕鋅電氣設(shè)備有限公司>>西門子PLC>> 西門子SM1221西門子SM1221
西門子SM1221西門子SM1221
| 參考價(jià): | 面議 |
 具體成交價(jià)以合同協(xié)議為準(zhǔn)
具體成交價(jià)以合同協(xié)議為準(zhǔn)- 西門子SM1221 產(chǎn)品型號(hào)
- 西門子/SIEMENS 品牌
- 代理商 廠商性質(zhì)
- 上海市 所在地
訪問(wèn)次數(shù):601更新時(shí)間:2017-07-20 10:24:30
聯(lián)系我們時(shí)請(qǐng)說(shuō)明是智能制造網(wǎng)上看到的信息,謝謝!
產(chǎn)品簡(jiǎn)介
公司服務(wù)理念【四個(gè)一,五個(gè)心】
一 張 笑 臉 相 迎 對(duì) 待 客 戶 要 熱 心
一 顆 真 心 相 待 對(duì) 待 工 作 要 細(xì) 心
一 腔 熱 血 相 助 解 答 問(wèn) 題 要 耐 心
一 個(gè) 滿 意 相 送 聽(tīng) 取 意 見(jiàn) 要 虛 心
改 進(jìn) 工 作 要 誠(chéng) 心
產(chǎn)品介紹
西門子SM1221
 | 6ES7221-1BF32-0XB0 SIMATIC S7-1200,數(shù)字輸入 SM 1221,8 DI,DC 24V, Sink/Source |
SIEMENS西門子上海朕鋅電氣設(shè)備有限公司
:鄭鑫
24小時(shí)銷售及:
電 話:
傳 真:021-6722 6033
手 機(jī):(同步)
: 1620718203
:www.zhenxindianqi。。cn
:
地址:上海市金山區(qū)楓灣路500號(hào)
1,SIWAREX CS概述
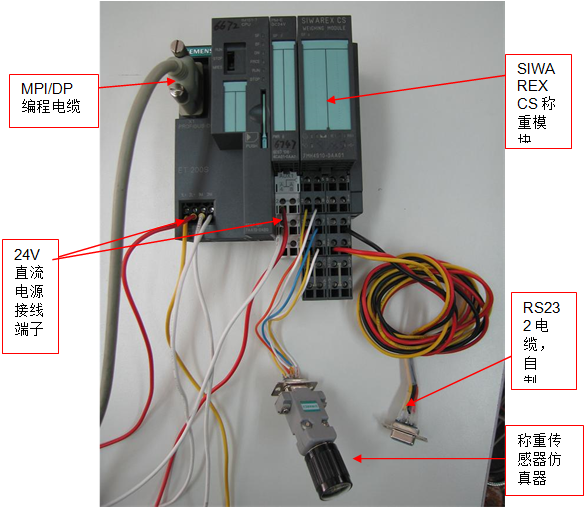
SIWAREX CS稱重模塊是ET200S的一個(gè)功能模塊(FM),可以直接插入到一個(gè)30mm寬的終端模塊上。稱重傳感器、電源和串行接口都是通過(guò)具有16個(gè)連接點(diǎn)的終端模塊來(lái)連接。通過(guò)ET200S可方便的把SIWAREX CS稱重模塊集成到SIMATIC系統(tǒng)中。本文通過(guò)將一個(gè)SIWAREX CS模塊集成一套到IM151-7 CPU的例程簡(jiǎn)要介紹如何用SIWATOOL CS軟件和STEP7軟件對(duì)SIWAREX CS進(jìn)行校秤和稱重。
硬件連接
所用到的硬件設(shè)備:
| 名稱 | 數(shù)量 | 訂貨號(hào) |
| IM 151-7 CPU,ET200S接口模塊 | 1 | 6ES7151-7AA13-0AB0 |
| PM-E DC 24V 電源模塊 | 1 | 6ES7138-4CA01-0AA0 |
| 電源模塊端子塊,螺釘型 | 1 | 6ES7193-4CD20-0AA0 |
| SIWAREX CS稱重模塊 | 1 | 7MH4910-0AA01 |
| 電子模塊端子塊,30mm寬,螺釘型 | 1 | 6ES7193-4JA00-0AA0 |
| MMC卡(64KB) | 1 | 6ES7953-8LF20-0AA0 |
| PS307 24VDC電源 | 1 | 6ES7307-1EA00-0AA0 |
| CP5512編程卡 | 1 | 6GK1 551-2AA00 |
| MPI/DP編程電纜 | 1 | |
| 串口電纜 | 1 | |
| 稱重傳感器仿真器 | 1 | |
| 筆記本電腦 | 1 |
所用到軟件:
| 名稱 | 訂貨號(hào) |
| STEP7 V5.4 組態(tài)編程軟件 | |
| WINCC Flexible2007 觸摸屏組態(tài)軟件 | |
| SIWATOOL CS校秤軟件 | 7MH4910-0AK01 |
| 示例項(xiàng)目及手冊(cè) | http://support.automation.siemens.com/CN/view/en/19249858/130000 免費(fèi)下載 |
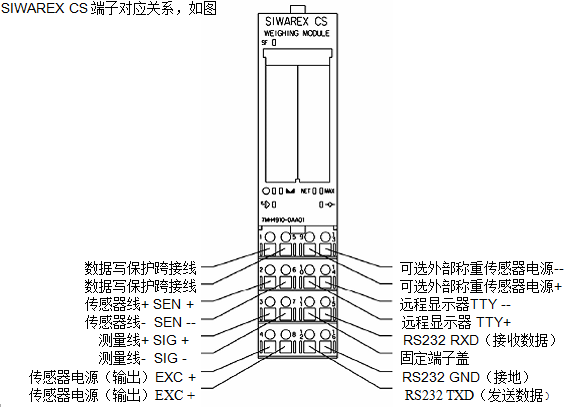
系統(tǒng)圖如下:
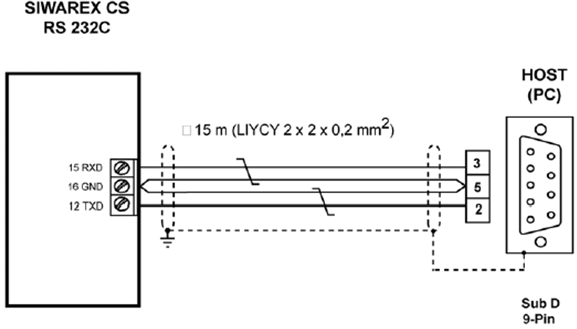
RS232串口電纜的對(duì)應(yīng)關(guān)系如下:
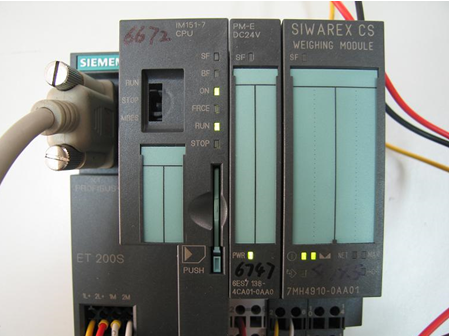
給系統(tǒng)通電,下載正確的硬件組態(tài),觀察指示燈,察看是否有“SF”故障燈亮。正常顯示如下:
2,通過(guò)SIWATOOL CS軟件校秤
在電腦上安裝SIWATOOL CS軟件后,可通過(guò)RS232串口聯(lián)接到SIWAREX CS模塊進(jìn)行校秤。使用SIWATOOL CS 校秤,只需在模塊正確通電后即可,而與CPU是否運(yùn)行,是否進(jìn)行了組態(tài)編程等無(wú)必要關(guān)系。
點(diǎn)擊“Online”通過(guò)RS232建立電腦與稱重模塊的連接,如果建立連接時(shí),在不斷的重試,請(qǐng)檢查接線及通訊設(shè)置。
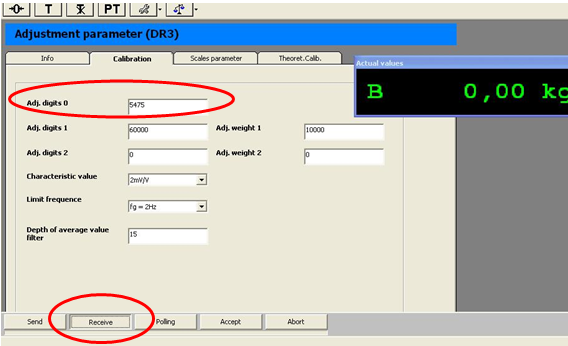
校秤主要在Adjustment parameter (DR3) 畫面中完成。建立連接后,在空秤的情況下,選擇校正零點(diǎn)有效命令,該命令將命令代碼3發(fā)送到稱重模塊。

執(zhí)行命令后,此時(shí)顯示重量變?yōu)?.00Kg,選擇接收,這樣就可以將Adj.digits 0的轉(zhuǎn)換值給讀取上來(lái)。此值請(qǐng)勿做任何修改,如果修改,會(huì)導(dǎo)致測(cè)量值的線性偏差。
修改校正砝碼的重量Adj. weight1。注意,所填數(shù)據(jù)的實(shí)際含義與在“Scales parameter”內(nèi)設(shè)置的小數(shù)點(diǎn)位數(shù)和重量單位有關(guān)。譬如若小數(shù)位為2,單位為kg,所設(shè)砝碼重量為100KG,那在Adj.weight1處就要填寫10000。

此次校準(zhǔn)砝碼重量為200KG,則需要寫入20000。
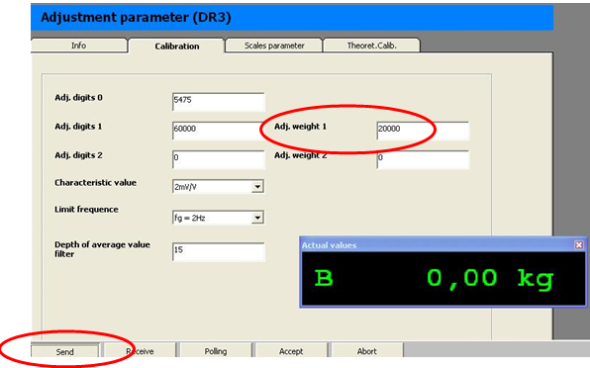
選擇發(fā)送,將校正砝碼重量寫入SIWAREX CS模塊中。
增加相應(yīng)的砝碼,此時(shí)顯示重量為175.45Kg,為校秤前不正確的重量(所加砝碼的重量值,至少在傳感器量程的5%以上,越大越好,建議在60%以上)。點(diǎn)擊校正重量1有效命令,該命令將命令代碼4發(fā)送到稱重模塊。
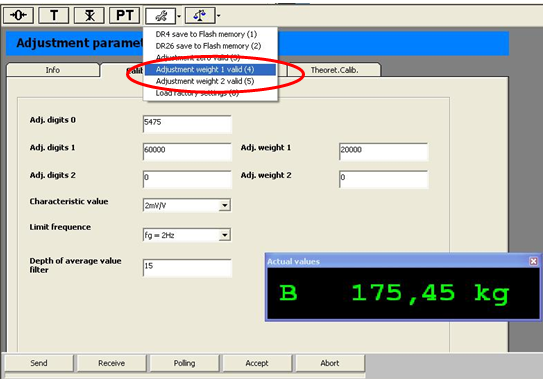
命令完成后,顯示重量變?yōu)?00Kg,這是校稱完成后的正確重量。重新選擇接收一下,這樣數(shù)據(jù)Adj.digits 1就保存下來(lái)了。

至此,校秤過(guò)程結(jié)束,可以自由增加重量,進(jìn)行稱重了,顯示重量即為正確的稱重重量。
可在如下圖界面查看相應(yīng)的狀態(tài)信息及故障信息:

3,通過(guò)STEP 7軟件校秤
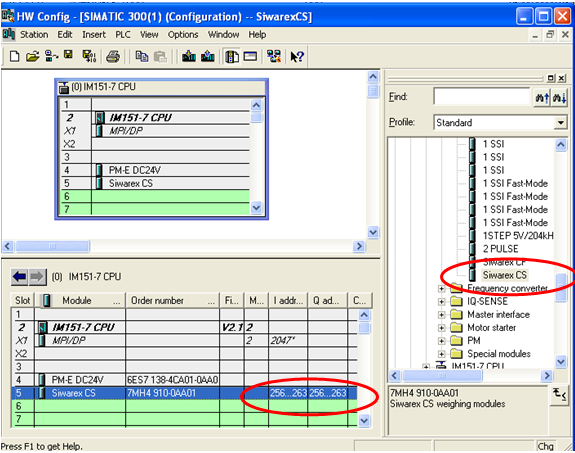
(1) 硬件組態(tài)及參數(shù)設(shè)置:
(2) PLC軟件編制
通過(guò) 25822042下載示例項(xiàng)目。示例項(xiàng)目分別提供了各種不同ET200S接口模塊的完整的PLC程序和WINCC Flexible組態(tài)程序,用于調(diào)校秤重模塊。
根據(jù)ET200S接口模塊的不同,從示例項(xiàng)目中選擇相應(yīng)的程序復(fù)制到當(dāng)前項(xiàng)目中,下載到PLC里。
其PLC程序結(jié)構(gòu)如下:
OB100:起動(dòng)組織塊,清除命令
OB35: 周期性寫命令,用于讀取當(dāng)前過(guò)程值
OB1: 主循環(huán)程序,循環(huán)調(diào)用FB42、FC2、FC30
FB42: 核心功能程序,處理與稱重模塊的數(shù)據(jù)通信,命令的執(zhí)行。
FC2: 處理報(bào)警信息
FC30: 管理三組對(duì)稱重模塊的命令
DB20: 秤矢量數(shù)據(jù)塊
DB21: 秤數(shù)據(jù)塊
DB41: FB42“SICS_DR“的背景數(shù)據(jù)塊
DB100:報(bào)警信息數(shù)據(jù)塊
核心功能程序塊FB42,其背景數(shù)據(jù)塊DB41,調(diào)用過(guò)程如下:
| CALL "SICS_DR" , DB41 | |||||||
| ADDR :=256 //稱重模塊起始地址 | |||||||
| DB_SCALE :=21 //秤數(shù)據(jù)塊號(hào) | |||||||
| DB_VECTOR :=20 //秤矢量數(shù)據(jù)塊號(hào) | |||||||
| CMD_IN :="DB_SCALE_CS".i_CMD_INPUT //輸入命令 | |||||||
| SEL_PROC_VAL :="DB_SCALE_CS".b_SELECT_PROC_VAL //輸入選擇輸出過(guò)程值代碼 | |||||||
| EXT_TARA :="DB_SCALE_CS".i_PRESET_TARE //設(shè)定皮重 | |||||||
| CMD_INPR :="DB_SCALE_CS".bo_CMD_IN_PROGRESS //命令處理中 | |||||||
| CMD_FOK :="DB_SCALE_CS".bo_CMD_FINISHED_OK //命令處理完成 | |||||||
| CMD_ERR :="DB_SCALE_CS".bo_CMD_ERR //命令故障 | |||||||
| CMD_ERR_C :="DB_SCALE_CS".b_CMD_ERR_CODE //故障代碼 | |||||||
| REF_COUNT :="DB_SCALE_CS".b_INFO_REFRESH_COUNT //刷新計(jì)數(shù) | |||||||
| ACT_SEL_PROC_VAL :="DB_SCALE_CS".b_SELECTED_PROC_VAL //實(shí)際選擇的過(guò)程值代碼 | |||||||
| PROC_VAL1 :="DB_SCALE_CS".i_PROCESS_VALUE //實(shí)際過(guò)程值 | |||||||
| SC_STATUS :="DB_SCALE_CS".w_SCALE_STATUS //狀態(tài)值 | |||||||
| ERR_MSG_C :="DB_SCALE_CS".b_OPR_ERR_MSG //操作員錯(cuò)誤信息 | |||||||
| FB_ERR :="DB_SCALE_CS".bo_FB_ERR //功能塊錯(cuò)誤 | |||||||
| FB_ERR_C :="DB_SCALE_CS".b_FB_ERR_CODE //功能塊錯(cuò)誤代碼 | |||||||
| START_UP :="DB_SCALE_CS".bo_START_UP_IN_PROGRESS //模塊正在啟動(dòng) | |||||||
| CMD_EN :="DB_SCALE_CS".bo_CMD_TRIGGER //命令觸發(fā)器 | |||||||
(3)通過(guò)變量表讀寫進(jìn)行校秤
相關(guān)命令含義如下,對(duì)DR3塊中的相關(guān)數(shù)據(jù)讀寫,需要用到命令203和403。

首先通過(guò)命令203,讀取校秤的相關(guān)參數(shù),如實(shí)際重量,校正重量1的讀數(shù),如下
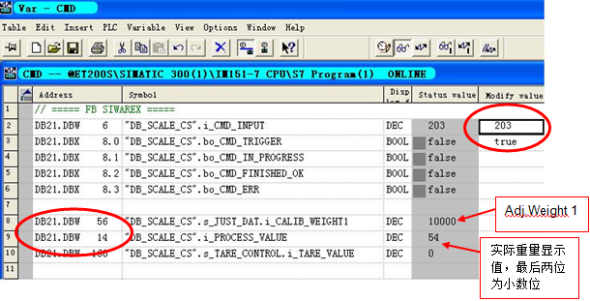
然后,執(zhí)行寫入放置砝碼的重量,比如90KG,需要寫入9000(zui后兩位為小數(shù)點(diǎn)為),執(zhí)行命令403,點(diǎn)擊觸發(fā)即可。

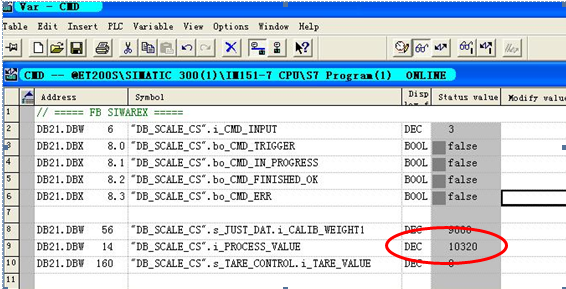
此時(shí)校正砝碼的重量已經(jīng)寫入到SIWAREX CS模塊中。下面執(zhí)行校準(zhǔn)零點(diǎn)和校準(zhǔn)量程1的命令
校正零點(diǎn)和量程1的命令代碼分別是3和4

執(zhí)行命令3,零點(diǎn)有效命令

觸發(fā)命令激活后,實(shí)際值變?yōu)?。

增加90KG的砝碼放入傳感器上,此時(shí)可能實(shí)際重量并未顯示90KG
執(zhí)行命令4,校正重量1有效,觸發(fā)命令激活后,秤的實(shí)際值就顯示為砝碼重量90.00KG
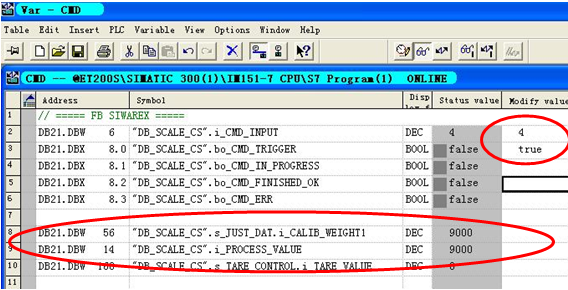
此命令執(zhí)行完后,校秤工作完成。
(4)通過(guò)觸摸屏面板進(jìn)行校秤
示例程序中集成有觸摸屏程序。正確下載觸摸屏程序并與CPU建立聯(lián)接后,可在觸摸屏上對(duì)稱重模塊進(jìn)行調(diào)校。
調(diào)校過(guò)程如下:
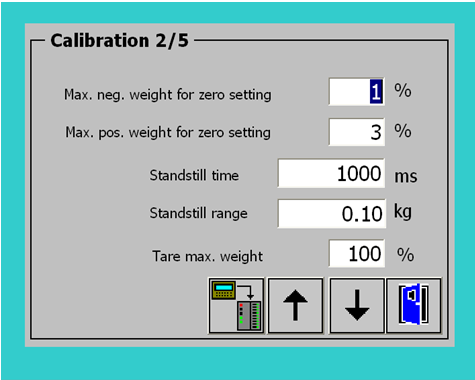
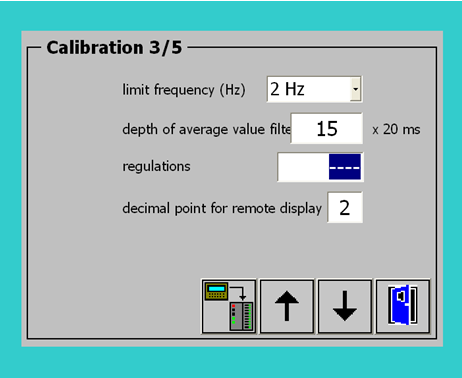
先在前三幅畫面中,設(shè)定稱重模塊的一些特性,如重量單位,特征值,顯示小數(shù)點(diǎn)位數(shù)等。

在畫面中,點(diǎn)擊  圖標(biāo),該按鈕將命令代碼(db21.dbw28,i_CMD2_Code)值設(shè)為403,并置位命令觸發(fā)信號(hào)(db21.dbx30.0,bo_CMD2_Trigger)。PLC程序運(yùn)行后將設(shè)定值寫入稱重模塊。
圖標(biāo),該按鈕將命令代碼(db21.dbw28,i_CMD2_Code)值設(shè)為403,并置位命令觸發(fā)信號(hào)(db21.dbx30.0,bo_CMD2_Trigger)。PLC程序運(yùn)行后將設(shè)定值寫入稱重模塊。
在空稱的情況下,在面板上點(diǎn)擊校正零點(diǎn)有效命令,該命令將命令代碼(db21.dbw28,i_CMD2_Code)值設(shè)為3 ,并置位命令觸發(fā)信號(hào)(db21.dbx30.0,bo_CMD2_Trigger),通過(guò)PLC程序發(fā)送到稱重模塊。

命令執(zhí)行后,顯示重量變?yōu)? Kg.

在調(diào)校重量1的輸入框中輸入調(diào)節(jié)重量1的砝碼重量,此處設(shè)為180Kg,點(diǎn)  圖標(biāo),將此值發(fā)送到稱重模塊,然后在秤上增加相應(yīng)砝碼,此時(shí)秤讀數(shù)開(kāi)始變化,顯示為150.79Kg,為校秤前不正確的重量。
圖標(biāo),將此值發(fā)送到稱重模塊,然后在秤上增加相應(yīng)砝碼,此時(shí)秤讀數(shù)開(kāi)始變化,顯示為150.79Kg,為校秤前不正確的重量。
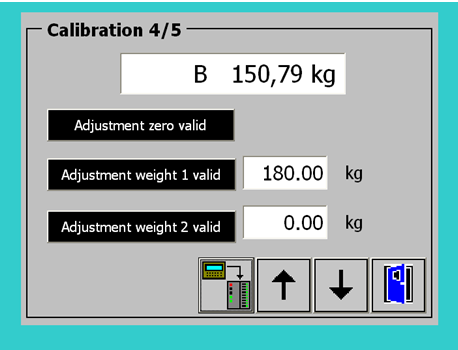
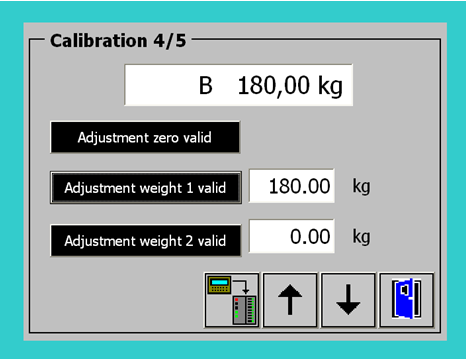
點(diǎn)擊按鈕調(diào)節(jié)重量1有效按鈕,該命令將命令代碼(db21.dbw28,i_CMD2_Code)值設(shè)為4,并置位命令觸發(fā)信號(hào)(db21.dbx30.0,bo_CMD2_Trigger),通過(guò)PLC程序發(fā)送到稱重模塊。命令執(zhí)行后,讀數(shù)變?yōu)樵O(shè)定重量,至此校秤完成,可以正常稱重。
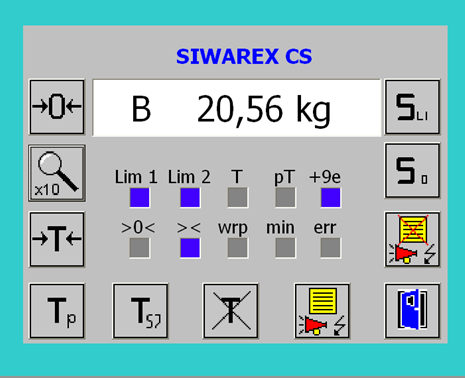
可以在主畫面中讀取秤的當(dāng)前重量和狀態(tài):
 西門子SM1221
西門子SM1221
在PLC中,DB21.DBW14代表以整數(shù)形式代表了當(dāng)前重量,DB21.DBW18代表了稱重模塊的狀態(tài),調(diào)試人員可方便的應(yīng)用這些信息將稱重系統(tǒng)集成到更復(fù)雜的自動(dòng)化系統(tǒng)中。
有關(guān)SIWAREX CS稱重模塊的更多的信息可參考《SIWAREX CS手冊(cè)》。
下面說(shuō)明如何通過(guò)組態(tài)"Time-based IO"功能實(shí)現(xiàn)結(jié)合某數(shù)字量輸入時(shí)輸入輸出間按預(yù)定義時(shí)間進(jìn)行響應(yīng)的功能。在這個(gè)例子中實(shí)現(xiàn)輸入輸出之間按預(yù)定義時(shí)間進(jìn)行響應(yīng)。 這意味著:
- 通道組態(tài)需設(shè)為 “8 輸入,8 輸出”
- DI模塊組態(tài)需設(shè)為“單獨(dú)使用輸入”
- 對(duì)于一個(gè)輸入點(diǎn)。例如 DI0,操作模式需設(shè)為“定時(shí)器 DI”
- 對(duì)于一個(gè)輸出點(diǎn)。例如 DQ0,操作模式需設(shè)為“定時(shí)器 DQ”
硬件組態(tài)
- 在項(xiàng)目樹中雙擊選項(xiàng)"Devices & Networks(設(shè)備和網(wǎng)絡(luò))" 。 打開(kāi)設(shè)備和網(wǎng)絡(luò)編輯器。
- 打開(kāi)ET 200MP 的設(shè)備視圖并且從硬件目錄里拖曳工藝模塊TM Timer DIDQ16x24 到ET 200MP的任意插槽內(nèi)。

圖 1
- 在ET 200MP 的設(shè)備視圖中選中工藝模塊 TM Timer DIDQ16x24。該工藝模塊的屬性顯示在巡視窗口中。在"General(常規(guī))" 找到"TM Timer DIDQ 16x24V > Basic parameters(基本參數(shù))"。通道組態(tài)設(shè)置為"8 inputs, 8 outputs"。
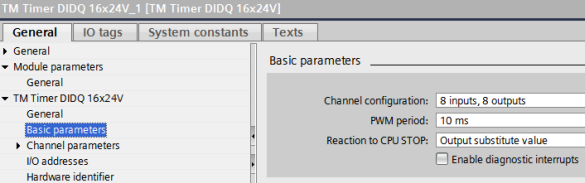
圖 2
- 通過(guò) "General(常規(guī))" 標(biāo)簽下導(dǎo)航到 "TM Timer DIDQ 16x24 > Channel parameters (通道參數(shù))> DI0/DI1"設(shè)置“組態(tài)DI組”為 "Use inputs individually(單獨(dú)使用輸入)",啟用DI0作為獨(dú)立定時(shí)器DI功能。設(shè)置操作模式為"Timer DI(定時(shí)器DI)",輸入延時(shí)為"None"。

圖 3
將使用的DQ的操作模式設(shè)為 “Timer DQ(定時(shí)器DQ)"。

圖 4
組態(tài)時(shí)間同步PROFINET IO系統(tǒng)
- 在 "Devices & Networks" 編輯器中打開(kāi)拓?fù)湟晥D。
- 根據(jù)硬件設(shè)置組態(tài)網(wǎng)絡(luò)拓?fù)洹?/span>

圖 5
- 在 "Devices & Networks" 編輯器中打開(kāi)網(wǎng)絡(luò)視圖。
- 將IO device ET 200MP 分配到 IO controller。

圖 6
- 在ET 200MP的設(shè)備視圖中選中接口模塊,以將 PROFINET IO 系統(tǒng)設(shè)為IRT模式和進(jìn)行同步模式設(shè)置。接口模塊的屬性在巡視窗口中顯示。在 "General(常規(guī))"標(biāo)簽下導(dǎo)航到"PROFINET interface [X1] > Advanced options(高級(jí)選項(xiàng)) > Isochronous mode(等時(shí)同步模式)"。使能功能"Isochronous mode(等時(shí)同步模式)"。
Ti/To 值保持 設(shè)置為"Automatic setting(自動(dòng)設(shè)置)"。PROFINET IO 系統(tǒng)和同步域所需的設(shè)置將會(huì)自動(dòng)完成。
在 Detail overview(詳細(xì)消息概覽) 標(biāo)簽下為TM Timer DIDQ 16x24V使能等時(shí)同步模式。
圖 7
- 在網(wǎng)絡(luò)視圖選中PROFINET IO 總線。PROFINET IO 系統(tǒng)的屬性顯示在巡視窗口中。 在"General" 標(biāo)簽下導(dǎo)航到 "PROFINET > Sync Domains > Sync-Domain_1",修改發(fā)送時(shí)鐘。在例子中使用預(yù)設(shè)時(shí)鐘1ms。

圖 8
- 在ET 200MP的設(shè)備視圖中選中工藝模塊TM Timer DIDQ 16x24V。該工藝模塊的屬性顯示在巡視窗口中。在"General" 標(biāo)簽下導(dǎo)航到"TM Timer DIDQ 16x24V > Channel parameters > IO addresses"。點(diǎn)擊"Input addresses > Organization block(組織塊)"下的"Add new(新增)..." 按鈕 來(lái)為輸入和輸出地址分配一個(gè)同步OB。 "Add new block(添加新塊)" 對(duì)話框打開(kāi)。

圖 9
在 "Add new block" 對(duì)話框中創(chuàng)建一個(gè)同步循環(huán)OB,,選擇類型為"Synchronous Cycle" 的組織塊并點(diǎn)擊 "OK"關(guān)閉對(duì)話框。

圖 10
將創(chuàng)建的同步循環(huán)OB分配給輸入輸出地址。 然后可以離開(kāi)設(shè)置過(guò)程映像 "TPA 1" 的對(duì)話框了。

圖 11
在網(wǎng)絡(luò)視圖選中PROFINET IO總線。PROFINET IO 系統(tǒng)的屬性顯示在巡視窗口中。在 "General" 標(biāo)簽下導(dǎo)航到"PROFINET > Domain management (域管理)> Overview isochronous mode(等時(shí)同步模式概覽)"。顯示關(guān)于組態(tài)的Ti/To 有效值。

圖 12
創(chuàng)建用戶程序
為了能在CPU的診斷緩沖區(qū)中顯示同步循環(huán)OB的溢出事件,在同步循環(huán)OB屬性的"Attributes(屬性)" 下使能選項(xiàng)"Report event overflow to diagnostics buffer(過(guò)載事件將在診斷緩沖區(qū)中留下一次記錄)"。 
圖 13
在 "Isochronous mode"下設(shè)置應(yīng)用周期為PROFINET IO 系統(tǒng)發(fā)送時(shí)鐘的整數(shù)倍。在本例中應(yīng)用周期設(shè)為1ms。這樣應(yīng)用周期等于發(fā)送時(shí)鐘。 
圖 14
打開(kāi)循環(huán)組織 OB 并按下列順序調(diào)用指令。
1. SYNC_PI:
使用SYNC_PI 等時(shí)同步輸入過(guò)程映像分區(qū)。
在輸入引腳 PART 輸入想要進(jìn)行同步更新的輸入過(guò)程映像分區(qū)的編號(hào)。
在硬件組態(tài)中已經(jīng)將過(guò)程映像分區(qū)“PIP1”分配給了工藝模塊TM Timer DIDO 16x24V 的輸入地址(見(jiàn)圖 11)。
在輸出引腳 FLADDR中顯示發(fā)生訪問(wèn)錯(cuò)誤時(shí),造成錯(cuò)誤的*個(gè)字節(jié)的地址。地址存儲(chǔ)在靜態(tài)變量"statPiFladdr"中。 
圖 15
2. TIO_SYNC:
使用TIO_SYNC 指令根據(jù)共享時(shí)間基準(zhǔn)同步TM 時(shí)間工藝模塊。
在輸入?yún)?shù) HWID_1 to HWID_8 處根據(jù)硬件組態(tài)設(shè)置TM時(shí)間工藝模塊的硬件標(biāo)志符。通過(guò) TIO_SYNCzui多可以同步 8 個(gè) TM 時(shí)間工藝模塊。
在輸入?yún)?shù) SendClock 處設(shè)置同步域的發(fā)送時(shí)鐘。應(yīng)用 PROFINET組態(tài)中的發(fā)送時(shí)鐘。
如果同步循環(huán)OB每個(gè)數(shù)據(jù)周期都被調(diào)用, 數(shù)據(jù)更新按照IPO模型進(jìn)行。這種情況將輸入?yún)?shù) PIP_Mode 的值設(shè)為 2 。
注意
IPO 模型描述按如下順序進(jìn)行數(shù)據(jù)處理的基本準(zhǔn)則:輸入-處理過(guò)程-輸出。創(chuàng)建一個(gè)數(shù)據(jù)類型為 UDT"TIO_SYNC_Data"的變量。在本例中創(chuàng)建了數(shù)據(jù)類型為 "TIO_SYNC_Data" 的靜態(tài)變量"statTioSyncData" 。
- 在輸入?yún)?shù)TIO_SYNC_Data 處填入數(shù)據(jù)類型為UDT "TIO_SYNC_Data"的變量靜態(tài)變量"statTioSyncData"。數(shù)據(jù)類型UDT "TIO_SYNC_Data" 包含用于同步模塊和傳遞 TIO_Time 的*結(jié)構(gòu)和數(shù)據(jù)。同樣將 數(shù)據(jù)類型為UDT "TIO_SYNC_Data" 的靜態(tài)變量 "statTioSyncData" 作為指令TIO_DI 和TIO_DQ 的 TIO_SYNC_Data 輸入?yún)?shù)。

圖 16
3. TIO_DI:
TIO_DI會(huì)持續(xù)檢測(cè)TM Timer DIDQ 數(shù)字量輸入中的沿,并返回關(guān)聯(lián)時(shí)間戳。TIO_DI 每次讀取輸入時(shí)調(diào)用一次。
在輸入?yún)?shù) HWID 處填寫TM Timer 工藝模塊的硬件標(biāo)識(shí)符。
在輸入?yún)?shù) Channel 處填寫已連接的TM Timer DIDQ的數(shù)字量輸入的編號(hào)。
在輸入?yún)?shù)EdgeSel 處要檢測(cè)時(shí)間戳的沿。在本例中寫入 3 ,意為上升沿和下降沿檢測(cè)(順序取決于發(fā)生時(shí)間)。
在輸入?yún)?shù)TO 處設(shè)定用于輸出等時(shí)輸出數(shù)據(jù)的時(shí)間。使用ET200M的硬件組態(tài) 中 time To (output process values) 中的數(shù)值 (見(jiàn)圖 12) 。
輸出參數(shù) DI 顯示數(shù)字量輸入的狀態(tài)。
輸出參數(shù)TimeStampRE顯示檢測(cè)到上升沿的時(shí)間。
- 輸出參數(shù)TimeStampFE 顯示檢測(cè)到下降沿的時(shí)間。

圖 17
4. 用戶應(yīng)用: 通過(guò)用戶應(yīng)用可以根據(jù)輸入時(shí)間戳和當(dāng)前時(shí)間 (TIO_Time)計(jì)算用于TM Timer DIDQ 工藝模塊輸出轉(zhuǎn)換的輸出時(shí)間戳。
5. TIO_DQ:
TIO_DQ 指令用于在的時(shí)間切換 TM Timer DIDQ 的數(shù)字量輸出。TIO_DQ 每當(dāng)時(shí)間控制輸出的輸出時(shí)間戳到來(lái)時(shí)執(zhí)行一次。通過(guò)輸入?yún)?shù)HWID 和 Channel TM Timer DIDQ工藝模塊中由時(shí)間控制輸出的地址。
在輸入?yún)?shù) "Out_Mode" 處數(shù)字量輸出沿的輸出模式。在本例中選擇模式3, 當(dāng)TimeStempRE (上升沿時(shí)間戳)=0或 TimeStampFE (下降沿時(shí)間戳)=0 時(shí),直接輸出每一個(gè)沿 。
在輸入?yún)?shù)TO 處設(shè)定用于輸出等時(shí)輸出數(shù)據(jù)的時(shí)間。使用ET200M的硬件組態(tài) 中 time To (output process values) 中的數(shù)值 (見(jiàn)圖 12) 。
指令TIO_DI 中被輸出參數(shù)的TimeStampRE 和 TimeStampFE 在TIO_DQ 指令中被為輸入?yún)?shù)TimeStampRE 和 TimeStampFE 。
輸入?yún)?shù) TimeStampRE and TimeStampFE 處設(shè)置的時(shí)間戳用于在時(shí)間在數(shù)字量輸出中輸出上升沿或下降沿。

圖 18
6. SYNC_PO:
SYNC_PO 指令用于在同步模式下更新輸出的過(guò)程映像分區(qū)。
在輸入引腳 PART 輸入想要進(jìn)行同步更新的輸出過(guò)程映像分區(qū)的編號(hào)。
在硬件組態(tài)中已經(jīng)將過(guò)程映像分區(qū)“PIP1”分配給了工藝模塊TM Timer DIDO 16x24V 的輸出地址(見(jiàn)圖 11)。
圖 19
注意
上述指令都是FC塊,這些指令輸入輸出引腳上使用的靜態(tài)變量來(lái)自FB的背景DB。在同步OB(OB 61)中調(diào)用FB塊時(shí)背景DB被創(chuàng)建
西門子編碼器
西門子編碼器6FX2001-2AB02
西門子編碼器6FX2001-2AB50
西門子編碼器6FC9320-3MN00
西門子編碼器6FX2001-2AF00
西門子編碼器6FX2001-2AC50
西門子編碼器6FX2001-2CC50
西門子編碼器6FX2001-2CB02
西門子編碼器6FX2001-2EB02
西門子編碼器6FX2001-2EC50
西門子編碼器6FX2001-2CF00
西門子編碼器6FX2001-2EF00
西門子編碼器6FX2001-2GB02
西門子編碼器6FX2001-2GC50
西門子編碼器6FX2001-2GF00
西門子編碼器6FX2001-3AB02
西門子編碼器6FX2001-2GE02
西門子編碼器6FX2001-3AC50
西門子編碼器6FX2001-3CB02
西門子編碼器6FX2001-3CB00
西門子編碼器6FX2001-3EB02
西門子編碼器6FX2001-3CC50
西門子編碼器6FX2001-3EC50
西門子編碼器6FX2001-3GB02
西門子編碼器ROD320.020-2500
西門子編碼器EWN 5194004205000
西門子步進(jìn)電機(jī)6FC5548-0AB06-0AA0
西門子編碼器聯(lián)軸節(jié)6FX2001-7KF10
西門子步進(jìn)電機(jī)6FC5548-0AB03-0AA0
西門子步進(jìn)電機(jī)6FC5548-0AB08-0AA0
西門子步進(jìn)電機(jī)6FC5548-0AB12-0AA0
西門子步進(jìn)電機(jī)6FC5548-0AB18-0AA0
西門子步進(jìn)驅(qū)動(dòng)6FC5548-0AA02-0AA0
西門子步進(jìn)電機(jī)6FC5548-0AB25-0AA0
西門子操作部件6FC5210-0DF22-0AA0
西門子步進(jìn)驅(qū)動(dòng)器
西門子步進(jìn)驅(qū)動(dòng)器及步進(jìn)電機(jī)
西門子操作模塊6FC5210-0DA00-1AA0
西門子操作模塊6FC5210-0DA00-1AA1
西門子車床數(shù)控系統(tǒng)
西門子電機(jī)編碼器
西門子電池盒6FC5247-0AA06-0AA0
西門子電機(jī)模塊6SL3120-1TE13-0AA3
西門子電池6FC5247-0AA18-0AA0
西門子電源6EP1334-3BA00
西門子電源6EP1333-2AA00
西門子電抗器6SN1111-0AA00-0BA1
西門子電源6EP1436-1SL11
西門子電源6EP1436-1SH01
西門子電源6EP1334-3BA00
西門子電源6EP1436-2BA00
西門子電源模塊6EW1861-2AF
西門子電源6EP1436-3BA00
西門子電源模塊6SL3130-7TE21-6AA3
西門子電源模塊6SL3130-7TE25-5AA3
西門子電源模塊6SL3130-7TE28-0AA3
西門子電源模塊6SL3130-7TE23-6AA3
西門子電源模塊6SL3130-7TE31-2AA3
西門子電源模塊6SN1145-1AA01-0AA0
西門子電源模塊6SN1145-1AA01-0AA1
西門子電子手輪6FC9320-5DC00
西門子電源模塊6SN1145-1BA02-0CA0
西門子電源模塊6SN1145-1BA02-0CA1
西門子定位模塊6ES7354-1AH01-0AE0
西門子電子手輪6FC9320-5DC01
西門子電阻模塊6SN1113-1AB01-0BA1
西門子動(dòng)力電纜
西門子功率模塊6SN1123-1AA00-0JA1
西門子光幕3RG7841-3DD01
西門子功率模塊6SN1123-1AA00-0CA1
西門子功率模塊6SN1123-1AA00-0EA0
西門子功率模塊6SN1123-1AA00-0LA0
西門子功率模塊6SN1123-1AA00-0LA1
西門子機(jī)床控制面板
西門子監(jiān)控模塊6SN1112-1AC01-0AA1
西門子光幕處理單元3RG7847-4BD
西門子交流伺服系統(tǒng)6SC6
西門子控制單元6SN1118-0NH11-0AA1
西門子控制系統(tǒng)
西門子機(jī)床控制面板6FC3178-3EF20
西門子冷卻部件6SN1162-0BA02-0AA2
西門子濾波模塊6SL3000-0HE15-0AA0
西門子濾波器6SL3000-0BE21-6AA0
西門子冷卻部件6SN1162-0BA03-0AA1
西門子驅(qū)動(dòng)端子6FX2003-0DA00
西門子驅(qū)動(dòng)611A
西門子模塊6FX1151-1BB01
西門子驅(qū)動(dòng)模塊6FC5548-0AC21-0AA0
西門子驅(qū)動(dòng)611D
西門子驅(qū)動(dòng)模塊6SN1111-0AB00-0AA0
西門子驅(qū)動(dòng)模塊6FC5548-0AC22-0AA0
西門子驅(qū)動(dòng)模塊6SN1115-0AA12-0AA0
西門子驅(qū)動(dòng)模塊6SN1115-0BA11-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0AD11-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0DG21-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0AE11-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0DH21-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0DG22-0AA0
西門子驅(qū)動(dòng)模塊6SN1118-0DG23-0AA0
西門子驅(qū)動(dòng)模塊6SN1118-0DJ21-0AA2
西門子驅(qū)動(dòng)模塊6SN1118-0DH22-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0DJ23-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0DJ23-0AA2
西門子驅(qū)動(dòng)模塊6SN1118-0DH23-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0DK21-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0DK23-0AA2
西門子驅(qū)動(dòng)模塊6SN1118-0DJ21-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0DK23-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0DM13-0AA0
西門子驅(qū)動(dòng)模塊6SN1118-0DM23-0AA0
西門子驅(qū)動(dòng)模塊6SN1118-0DM21-0AA0
西門子驅(qū)動(dòng)模塊6SN1118-0DM13-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0DM23-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0DM23-0AA0
西門子驅(qū)動(dòng)模塊6SN1118-0DM31-0AA2
西門子驅(qū)動(dòng)模塊6SN1118-0DM33-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0DM31-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0DM33-0AA2
西門子驅(qū)動(dòng)模塊6SN1118-0NH11-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0NJ01-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0NH01-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-1NJ01-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-0NK01-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-1NH01-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-1NK01-0AA0
西門子驅(qū)動(dòng)模塊6SN1121-0BA11-0AA0
西門子驅(qū)動(dòng)模塊6SN1122-0BA11-0AA1
西門子驅(qū)動(dòng)模塊6SN1118-1NK01-0AA1
西門子驅(qū)動(dòng)模塊6SN1121-0BA13-0AA0
西門子驅(qū)動(dòng)模塊6SN1145-1BA01-0BA0
西門子驅(qū)動(dòng)模塊6SN1121-0BA11-0AA1
西門子驅(qū)動(dòng)模塊6SN1121-0BA12-0AA0
西門子驅(qū)動(dòng)模塊6SN1145-1BA01-0DA0
西門子驅(qū)動(dòng)模塊6SN1145-1BA01-0BA1
西門子驅(qū)動(dòng)模塊6SN1123-1AA00-0EA2
西門子驅(qū)動(dòng)模塊6SN1145-1BA01-0BA2
西門子驅(qū)動(dòng)模塊6SN1145-1BA01-0DA1
西門子驅(qū)動(dòng)模塊6SN1145-1BB00-0EA0
西門子驅(qū)動(dòng)模塊6SN1145-1BB00-0EA1
西門子驅(qū)動(dòng)模塊6SN1145-1BA02-0CA2
西門子驅(qū)動(dòng)模塊6SN1145-1BB00-0FA1
西門子驅(qū)動(dòng)模塊6SN1146-1AB00-0BA0
西門子驅(qū)動(dòng)維修 西門子伺服維修
西門子適配器6ES7972-0CB20-0XA0
西門子驅(qū)動(dòng)模塊6SN1146-1AB00-0BA1
西門子手持單元6FX2007-1AC02
西門子手持單元6FX2007-1AC03
西門子手持單元6FX2007-1AC14
西門子手持單元 MINI/B-MPI HHU
西門子手持單元6FX2007-1AC04
西門子手持單元6FX2007-1AD03
西門子手持單元6FX2007-1AD00
西門子手持單元6FX2007-1AD01
西門子手持單元6FX2007-1AD10
西門子手持單元6FX2007-1AD02
相關(guān)產(chǎn)品


