




 具體成交價以合同協議為準
具體成交價以合同協議為準
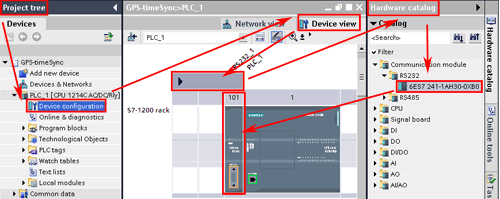
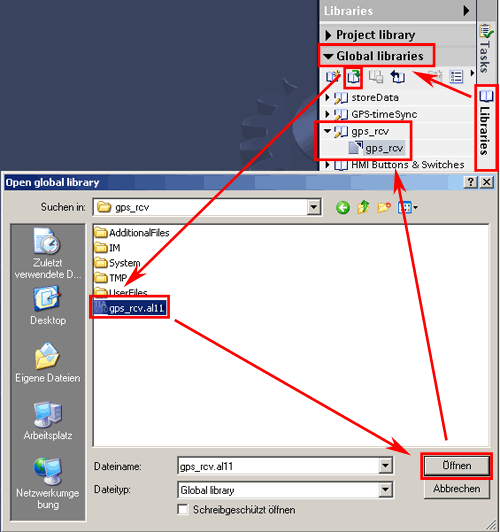

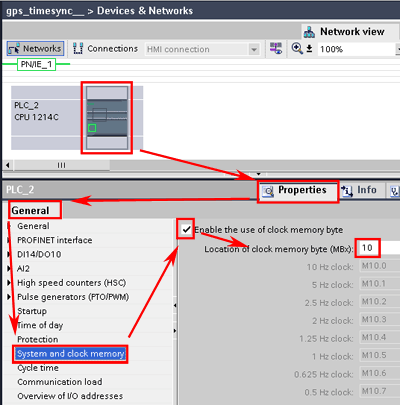 圖 05
圖 05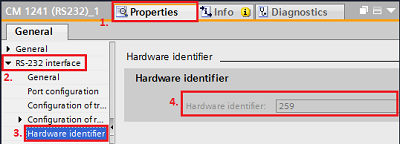
¥面議

上海朔川電氣設備有限公司
 免費會員
免費會員產品介紹
西門子6AV2101-3AA03-0AE5性能參數 西門子6AV2101-3AA03-0AE5性能參數
可用圖片 | 6AV2101-3AA03-0AE5 SIMATIC WINCC COMFORT V13 SP1 UPGRADE V11..V12 -> V13 SP1 OR V11..V12 COMBO ->V13 SP1 COMBO; ENGINEERING SOFTWARE IN TIA PORTAL; FLOATING LICENSE; SOFTWARE AND DOCUMENTATION ON DVD; LICENSE KEY ON USB-STICK; CLASS A; 6 LANGUAGES: GE,EN,IT,FR,SP,CH; EXECUTABLE UNDER WINDOWS 7 (32 BIT, 64 BIT), WINDOWS 8.1 (64 BIT), WINSRV 2008/2012 R2 (64 BIT); FOR CONFIGURATION OF SIMATIC PANELS |
公司名稱:上海朔川電氣設備有限公司
聯 系 人:吉夢琪
:
地址:上海市金山區涇波路129號
信譽*,客戶*是公司成立之初所確立的宗旨,在公司的嚴格要求和員工們不折不扣地貫徹執行下發展延續至今。“假一罰十”一直是我公司的主動承諾。
承諾一:1、保證全新*
承諾二:2、保證安全準時發貨
承諾三:3、保證售后服務質量
流程一:1、客戶確認所需采購產品型號
流程二:2、我方會根據詢價單型號查詢價格以及交貨期,擬一份詳細正規報價單
流程三:3,客戶收到報價單并確認型號無誤后訂購產品
流程四:4、報價單負責人根據客戶提供型號以及數量擬份銷售合同
流程五:5、客戶收到合同查閱同意后蓋章回傳并按照合同銷售額匯款到公司開戶行
流程六:6、我公司財務查到款后,業務員安排發貨并通知客戶跟蹤運單
您隨口的一問多少錢,我就立馬放下筷子趕緊回話。
您隨口的一句有沒有現貨,我就立馬進去系統拼命地找。
您隨口問了問能優惠不?我就到處想辦法。
您很隨便,我卻很當真;您不知道我的回答,只為得到您的滿意..……
只因為我和您不止是客戶的關系,而是把您當我的朋友,在全力以赴做到我能做到的
您的選擇您的支持是我zui大的動力! ————致我親愛的客戶(好朋友)
產品簡述:質保一年,一年內因產品質量問題免費更新產品不收取任何費用
哪里有賣 要多少錢 哪里有 哪里能買到 要在哪里買 在哪里有賣的 價格,參數,型號,哪家便宜,比較便宜,哪里有,銷售,訂貨號,多少錢?哪家價格好? 廠家,性能,優點,包裝,用途,售后服務!哪里有賣 代理商 總代理商
無論是否正在組態硬件、變頻器的參數還是正在設計HMI畫面 – TIA 博途使其更加高效。
使用SIMATIC and STEP 7 (TIA Portal)高效的完成自動化任務

在這些頁面下您可以瀏覽和下載這些視頻。此外,相關的博途工程對應的每個自動化任務都是可以下載的。
Overview
|
|
|
|
|
|
| 時間節省 | 控制 | 通訊 | 通訊 | 驅動 | 技術 |
|
|
| |||
| 安全 | 仿真 | 維護 |
更多信息請點擊:
www.siemens。。com/automation-tasks
| TIA 博途: 節省時間工具 - 面板技術 | 鏈接 |
| 面板技術可以幫助工程師節省大量時間。因為能夠同時創建可視化和控制;支持保存面板到全局庫并且反復使用它。 這意味著能夠快速的進行HMI開發,同時能夠快速且高效的實現全局改變! | 78380998 |
| TIA 博途: 節省時間工具 - 改變設備類型 | 鏈接 |
| 在自動化項目中經常會提出新的需求;能夠輕松改變設備類型的能力恰迎合了那些新的需求。從而幫助工程師節省大量時間。 | 78380995 |
| TIA 博途: 節省時間工具 - 畫面動畫 | 鏈接 |
| 當通過簡單的動畫快速準確的創建可視化應用時,屏幕動畫可以大量的節省時間。 | 78530249 |
SIMATIC S7-1200: AT 2 - 用戶定義網頁 | 鏈接 |
| 用戶自定義Web界面是診斷和控制工廠級設備非常重要的工具。擁有大量遠程自動化系統的zui終用戶,可以直接通過智能手機/設備zui大限度的透明的訪問所有的系統。 | 75311612 |
| SIMATIC S7-1200: AT 4 - 簡單的 HMI | 鏈接 |
| 在工程組態中,輕松添加一個HMI到當前的自動化系統的能力是一個很大的優點。這是因為圖形化的用戶界面使控制系統更加簡單直觀。 | 75313273 |
| SIMATIC S7-1200: AT 5 - HMI 到 SCADA | 鏈接 |
| 能夠利用當前的HMI畫面和變量,并且在工廠范圍內重復使用所有的內容。為所有的自動化系統提供了廣泛的適用性和靈活性。 | 75312933 |
| SIMATIC S7-1200: AT 9 - SIMATIC App | 鏈接 |
| 自動化系統的Apps已經增加了診斷和控制的功能——隨時隨地! | 75312637 |
| 仿真: AT 1 - SIMATIC S7-1500 & HMI 精智面板 | 鏈接 |
| 集成仿真和測試對于工程師是有很大幫助的。因為它能幫工程師一遍又一遍地測試硬件配置以及代碼。因為無需要購買硬件就可以實現zui初的測試,從而節省了寶貴的工程時間和前期項目成本。 | 99572823 |
| 維護: AT 1 - 遠程HMI 訪問 | 鏈接 |
| 遠程HMI訪問對于工程師有很大的幫助。因為可以使用網頁瀏覽器快速高效地獲得診斷信息,并且能夠在庫中添加控件圖標創建更加*的HMI架構。它節省了寶貴的工程時間和解決問題的時間。 | 99572770 |
| 可視化: AT1 - 在HMI上運行和停止CPU | 鏈接 |
| 對于工程師通過在HMI上遠程啟停 CPU 有巨大的優勢。因為通過這種方式不需要為了設置CPU的通斷而打開現場的控制柜。并且還可以通過webserver或者SCADA 連接遠程操作。 | 99521371 |
| 可視化: AT2_HMI_to_PC_RunTime | 鏈接 |
| 具有把當前面板的HMI項目在基于PC的人機界面中重復利用的能力。例如,工廠擴建,對工程師有巨大的優勢。因為通過這種方式自動化架構會具有很高的靈活性和可擴展性。 從而節能寶貴的工程時間。 | 99522231 |
附加關鍵詞
調查, 總結, 概括, 綜述, 綜合評述, 工程效率, 性能, 全集成自動化, 自動化解決方案, 工程平臺SIMATIC PCS 7 支持集成PROFIBUS DP, PROFIBUS PA 和FF設備,同時也支持傳統的HART通訊現場設備。和DP、PA 和FF設備不同,HART現場設備并不在硬件組態中顯示。
以下過程描述硬件組態DP接口模塊(ET 200M)組態HART現場設備。
1. 插入 PROFIBUS DP 接口模塊
從硬件目錄中選擇相關的 DP 接口模塊,并將它移動到要求的 PROFIBUS DP 段(例如,拖放該模塊)。
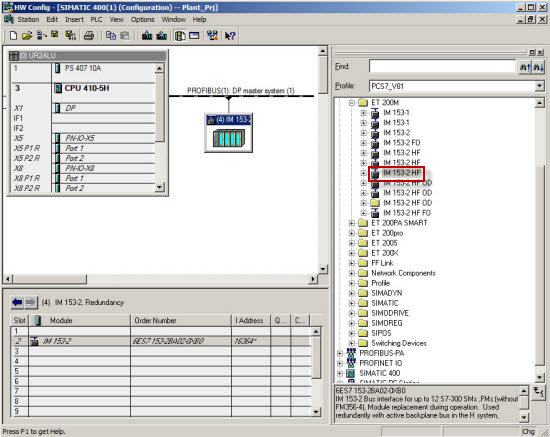
圖. 01
2. 插入HART模擬量模塊
硬件目錄中選擇相關的SIMATIC HART接口模塊并放置在DP接口模塊相應插槽(例如拖拽)。如果沒有其他接口模塊或者模塊需要組態,編譯修改并下載至自動化系統。

圖. 02
注意
必須激活HART功能。右擊模擬量輸入模塊在彈出菜單中選擇“對象屬性...”,切換至“輸入”標簽頁檢查通道HART功能是否激活。
3. 插入"HART field device"模塊
將剛剛插入的 HART 模擬量模塊項插入硬件目錄,并將相應的“HART field device”模塊插入 SIMATIC HART 模擬模塊的匹配插槽中(例如,拖放該模塊)。
 圖. 圖. 03
圖. 圖. 03
4. SIMATIC PDM設備分配
雙擊HART現場設備。點擊“OK”確認保存修改。打開SIMATIC PDM硬件選擇對話框,其中包含所有已集成的HART現場設備。

圖. 04
在硬件選擇樹中,選擇所需HART設備后OK確認。
注意
"硬件識別"功能能夠識別已連接模塊的設備。要求是修改的硬件組態已下載至自動化系統。不要下載自動化系統去增加和刪除HART現場設備。
5. SIMATIC PDM中設備參數
在SIMATIC PDM為現場設備分配參數和*名稱(TAG)。

圖. 05
通過菜單"File > Save"保存修改, "File > Close"關閉SIMATIC PDM。
注意
如果設備已經參數化完成,可以通過"Device > Upload to PG/PC..."方式將這些參數讀出來。
6. 修改測量點名稱
右擊硬件組態中HART現場設備模塊,彈出菜單中選擇"Object Properties"。在屬性窗口中分配*名稱然后“OK”應用更改。
 圖. 圖. 06
圖. 圖. 06
注意
從SIMATIC V8.0 SP1起,支持PROFINET HART,可以使用上述步驟在PROFINET接口模塊后組態HART現場設備。
描述
使用 S7-1200 控制器可以接收依據 NMEA 0183 標準 RMC 數據類型的 GPS 報文幀。GPS 報文幀通過連接在 S7-1200 通訊模塊 CM1241 RS 232 接口的 GPS 接收器讀取。
附件庫中提供的的“gps_rcv” 功能塊,將提供給您當前位置的經度和緯度以及 UTC 時間日期格式的 DTL 數據變量,并且更新系統時間。“ gps_rcv” 功能塊需要按照表 02 中的參數預先在硬件組態中設置。S7-1200 CM1241 RS 232 通訊模塊不需要其他附加的端口組態。
“gps_rcv” 功能塊在 CPU 一個循環周期被執行。當前位置值和日期時間信息會在若干周期后可用。變量的更多細節可參考表 06。
使用說明
*的 NMEA-0183 標準zui小數據記錄 C (RMC) 用于評估地理位置和 UTC 時間。數據結構如下。
| 信息 | 內容 | 注釋 |
| 數據記錄的識別 | $GPRMC | 數據記錄的開始 |
| UTC 時間 | "hhmmss" or "hhmmss.sss" | - 用于同步的數據連接 |
| 狀態 | "A" for OK or "V" for warning | - 用于評估數據的有效性 |
| 緯度 | "ddmm.mmmm" | - 用于小數格式的緯度計算 |
| 方向 | "N" for North or "S" for South | |
| 經度 | "dddmm.mmmm" | - 用于小數格式的經度計算 |
| 方向 | "E" for East or "W" for West | |
| 速度 | - 不適應 | |
| 路線 | ||
| 日期 | "ddmmyy" | - 用于同步的 UTC 時間連接 |
| 偏離 | - 不適應 | |
| 標記 | ||
| 信號完整性 | 僅適應于 NMEA 0183 版本 V2.3 | |
| 校驗和 | "*hh" | 數據記錄的結束 |
表 01
單獨的信息塊以逗號分隔 (“,”)。
注意
Microsoft Windows 自帶的超級終端也可用于檢測數據記錄的讀取。
通訊參數
“gps_rcv” 功能塊用于配置接收 NMEA 0183 標準的 GPS 接收器。規格如下:
參數 | 設定 |
| 奇偶 校驗 | 無 |
| 數據 位 | 每個字符 8 個數據位 |
| 停止 位 | 1 |
| 流量 控制 | 無 |
表 02
硬件構成
“gps_rcv” 功能塊在下面列出的 GPS 接收機上測試成功。
- NAVILOCK NL-403P (額外的電源供電:5 V 直流電源 LOGO! POWER 5V DC/3A)
- GARMIN GPS18x PC (額外的電源供電:通過 S7-1200 CPU 供電,8-30 V直流 )
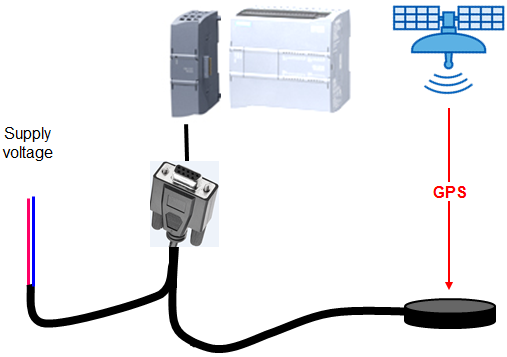
圖 01
S7-1200 PLC 硬件組態
| No. | S7-1200 PLC 硬件組態 |
| 1. | 連接 GPS 接收器到 S7-1200 PLC。 按照如下步驟:
注意 |
| 2. | “設備組態” 中添加通訊模塊 按照如下步驟:
|
表 03
評估位置值和同步 S7-1200 PLC 系統時間和日期
請參考項目附件中的“gps_rcv_proj.zip” 壓縮文件中的例子。
| No. | 同步 S7-1200 PLC 的系統時間和日期 |
| 1. | 下載并打開 S7-1200 全局庫“gps_rcv”。 按照如下步驟:
|
| 2. | 調用“gps_rcv” 功能塊 按照如下步驟:
|
表 04
“gps_rcv” 功能塊輸入參數
| 連 接 | 數據類型 | 注釋 |
| cmd_get_ time_n_date | BOOL | RMC-GPS 消息的評估是上升沿觸發的。 示例程序中使用時鐘存儲器位作為周期觸發信號。
|
| cmd_hw_id | PORT | 在這里,輸入通信模塊的硬件標識符。硬件標識符在“設備組態” > “CM 1241 屬性” > “RS 232 接口” > “硬件標識符”中顯示。
圖 06 |
| cmd_baud | UInt | RS 232 端口的波特率:
|
| cmd_restart | BOOL | 可選:這個變量的上升沿時可以修改 RS 232 接口的波特率。 |
表 05
“gps_rcv” 功能塊輸出參數
| 變 量 | 數 據類型 | 注釋 |
| "gps_rcv_DB.gps_latitude_Real" | Real | 此變量包含小數格式(32 位浮點數)的當前緯度位置。結合“return_done” 評估該變量。 |
| "gps_rcv_DB.gps_latitude_LReal" | LReal | 此變量包含小數格式(64 位浮點數)的當前緯度位置。結合“return_done” 評估該變量。 |
| "gps_rcv_DB.gps_longitude_Real" | Real | 此變量包含小數格式(32 位浮點數)的當前經度位置。結合“return_done” 評估該變量。 |
| "gps_rcv_DB.gps_longitude_LReal" | LReal | 此變量包含小數格式(64 位浮點數)的當前經度位置。結合“return_done” 評估該變量。 |
| "gps_rcv_DB.return_done" | BOOL | 當 GPS 數據幀被成功接收和 CPU 系統時間更新成功時,在這個掃描周期該變量被置位為 “true” 。 |
| "gps_rcv_DB.return_aborted" | BOOL | 當 GPS 數據幀或 CPU 系統時間同步失敗時,在這個掃描周期該變量被置位為 “true” 。 |
| "gps_rcv_DB.gps_time_n_date" | DTL | 該變量包含接收 GPS 數據的當前 UTC 時間。“return_done” 為 “true” 時,CPU 系統時間被同步為該變量。 |
相關產品
-

-
¥面議
-
¥面議
-
 ¥面議
¥面議

