




 具體成交價以合同協議為準
具體成交價以合同協議為準

R88M-G05030H歐姆龍交流伺服電機和驅動器 R88M-G40030L
¥面議

北京裕林同創自動化技術有限公司
 免費會員
免費會員簡單!
調整更簡單
利用實時自動調諧設定良好增益
搭載了實時自動調諧功能,可實時推算設備的負載,根據其結果自動設定良好增益,調整變得更簡單。

選擇良好電機
可應對各種用途的豐富品種
電機容量豐富,可以應對各種應用。可以根據客戶用途來選擇良好電機。
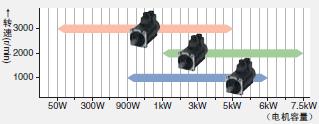
*僅7.5kW時,額定轉速為1,500r/min。
減小控制柜的設置空間
伺服驅動器小型化
伺服驅動器的設置面積與本公司以往產品相比削減了32%,更有利于控制柜的小型化。

高性能!
縮短間歇時間
大幅度提高速度響應頻率
速度響應頻率比本公司以往產品提高了2.5倍,以求做到進一步縮短調整時間,實現機器的高速、高響應化。

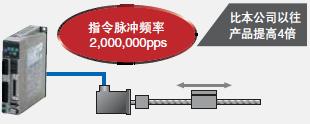
縮短間歇時間
提高指令脈沖頻率來高速定位
指令脈沖頻率比本公司以往產品提高了4倍,因此可以實現高速、高精度控制。
提高加工精度
搭載了全容量17位的編碼器*1,所以高精度
是本公司以往產品*2的2倍精度,從而實現了亞微米高精度定位控制,同時還實現了低速領域下的穩定控制。

*1 帶值編碼器的伺服電機。
*2與本公司以往機型相比。(750W以下帶值編碼器的伺服電機)
功能強大!
降低機械振動
通過適應濾波器快速抑制振動
即使共振頻率發生變化也能實時自動追蹤,可以降低傳送帶等剛性較低的機械振動。

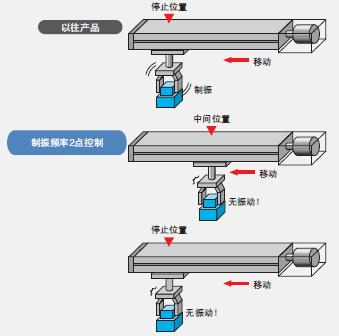
縮短間歇時間
通過制振控制功能降低機械振動
通過去除停止位置和中間位置的振動頻率成分,來抑制剛性較低的機械振動。(制振頻率2點控制)
Smartstep A系列和Smartstep Z系列伺服驅動器接收脈沖信號;
R88D-WT系列的伺服即可以接收脈沖信號也可接收-10~10V的模擬量信號。
R88D-U系列伺服驅動器接收脈沖信號。
R88D-UA系列伺服驅動器接收-10~10V的模擬量信號。
R88M-G05030H R88M-G05030H-S2
R88M-G10030L R88M-G10030L-S2
R88M-G20030L R88M-G20030L-S2
R88M-G40030L R88M-G40030L-S2
R88M-G05030H R88M-G05030H-S2
R88M-G10030H R88M-G10030H-S2
R88M-G20030H R88M-G20030H-S2
R88M-G40030H R88M-G40030H-S2
R88M-G75030H R88M-G75030H-S2
R88M-G05030H-B R88M-G05030H-BS2
R88M-G10030L-B R88M-G10030L-BS2
R88M-G20030L-B R88M-G20030L-BS2
R88M-G40030L-B R88M-G40030L-BS2
R88M-G05030H-B R88M-G05030H-BS2
R88M-G10030H-B R88M-G10030H-BS2
R88M-G20030H-B R88M-G20030H-BS2
R88M-G40030H-B R88M-G40030H-BS2
R88M-G75030H-B R88M-G75030H-BS2
伺服驅動器原理如下圖所示,速度指令和速度反饋信號在速度控制器的輸入端進行比較,速度控制器輸出電流指令信號,其表征是直流量,因電機為交流電機,因此必須把該直流量交流化,同時使該交流指令的相位由轉子磁極位置決定。電流指令頻率由轉子磁極的旋轉速度決定并把電流指令矢量與磁極產生的磁通相正交的空間位置上,為此,將位置檢測器輸出的磁極位置信號,在乘法器中與直流電流指令值相乘,從而在乘法器的輸出端可獲得交流指令信號,交流指令信號與電流反饋信號相比較后,差值送入電流控制器,依靠電流控制回路高速跟蹤能力,使電機定子電樞繞組中產生出波形與交流電流指令相似的正弦電流,該電流與永磁體相互作用產生電磁轉矩,推動電機運動。
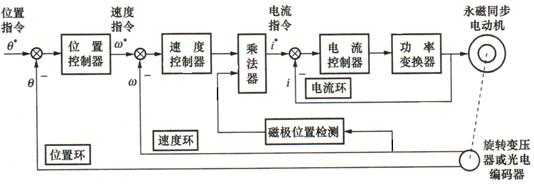
伺服驅動器工作原理示意圖
功率變換器主要由整流器和逆變器兩部分組成。整流器將輸入的三相交流電整流成直流電,經過電容器濾波平滑后提供給逆變器作為它的直流輸入電壓,逆變器的作用似在脈寬調制控制信號的驅動下,將輸入的直流電變成電壓與頻率可調的交流電,輸入到伺服電機的電樞繞組中。脈寬調制回路以一定的頻率產生出觸發功率器件的控制信號,使功率逆變器的輸出頻率和電壓保持協調關系,并使流入電樞繞組中的交流電流保持良好的正弦性。
北京裕林同創自動化技術有限公司 - 主營產品: 歐姆龍傳感器,西克傳感器,歐姆龍PLC,霍尼韋爾變頻器
智能制造網設計制作,未經允許翻錄必究 Copyright(C) http://www.xashilian.com All rights reserved
以上信息由企業自行提供,信息內容的真實性、準確性和合法性由相關企業負責,智能制造網對此不承擔任何保證責任。請輸入賬號
請輸入密碼
請輸驗證碼

