




 具體成交價以合同協議為準
具體成交價以合同協議為準







































6ES7952-1KY00-0AA0西門子6ES7952-1KY00-0AA0存儲卡
¥面議

上海朕鋅電氣設備有限公司
 免費會員
免費會員西門子模塊6ES73221CF000AA0
 | 6ES7322-1CF00-0AA0 SIMATIC S7-300,數字輸出 SM 322,電位隔離, 8 DA,DC 48-125V,1.5A, 1x 20極 |
SIEMENS西門子上海朕鋅電氣設備有限公司
:www.zhenxindianqi。。cn
1. 產品概況
1.1 引言
自動化領域的當前發展主流趨勢是基于PLC集成的解決方案。在實現若干復雜工藝功能和運動控制的應用中,基于PLC的機電一體化1)解決方案得到了迅速的推廣,它既能為用戶提供更加靈活和更加效能的機械設備,也能大大地節約制造成本。因此,機電一體化的理念正逐漸地貫徹到越來越多的項目規劃和產品設計中。
在機電一體化方案中,注重運動控制的工藝功能在自動化系統和驅動系統中得到了廣泛的應用。西門子的Technology CPU(或稱T CPU)實現了在一個SIMATIC CPU中集成工藝和運動控制功能,它不僅可*地執行開環控制和運動控制的任務,而且能*集成在SIMATIC產品家族和TIA(Totally Integrated Automation,全集成自動化)環境之中。
作為新的SINAMICS驅動家族的一員,SINAMICS S120是滿足機器和工廠框架中高性能要求的模塊化驅動系統。S120提供了高性能的單軸和多軸驅動,憑借其擴展性和靈活性,可廣泛應用在眾多行業。
1)機電一體化(Mechatronics),結合了機械工程、計算機技術和電子技術的綜合性學科,常用于制造業的設計和開發工作。
1.2 Technology CPU產品介紹
目前西門子提供了三款T CPU(如圖1)供用戶選擇:315T-2DP、317T-2DP和317TF-2DP。CPU 315T-2DP/CPU 317T-2DP應用在運動控制和標準控制相結合的典型應用中;CPU317TF-2DP除了包含了以上兩款產品的所有功能,還提供了額外的故障安全功能,可應用在標準控制、運動控制和安全相關控制相結合的綜合應用之中。

圖1 T CPU產品家族
T CPU包括以下部分:
系統提供預編程的符合PLCopen認證的功能塊簡化了用戶的編程工作。STEP 7選件包S7-Technology可用于對所有的工藝功能進行編程和調試。
T CPU可同時處理多達32個(對于315T-2DP)或64個(對于317T(F)-2DP)工藝對象。
更多T CPU產品信息請參考支持中心提供的相關網頁。
1.3 SINAMICS S120產品介紹
Sinamics S120 是西門子公司推出的全新的集 V/F、矢量控制及伺服控制于一體的驅動控制系統,它不僅能控制普通的三相異步電動機,還能控制同步電機、扭矩電機及直線電機。其強大的定位功能將實現進給軸的、相對定位。內部集成的 DCC(驅動控制圖表)功能,用 PLC 的 CFC 編程語言來實現邏輯、運算及簡單的工藝等功能。
S120分為兩種,AC/AC(單軸驅動器)和DC/AC(多軸驅動器)。
更多S120產品信息請參考支持中心提供的相關網頁。
2. 準備
2.1 環境要求
2.1.1 本文檔所述實例基于以下硬件環境:
• PS307 5A 6ES7307-1EA00-0AA0
• CPU 317TF-2DP 6ES7317-6TF14-0AB0
• SIMATIC MMC 8M 6ES7953-8LP11-0AA0
• SIMATIC Field PG M3 6ES7715-1BB23-0AA1
• PROFIBUS電纜
• 其他S7 300模塊(如果有,如DI、DO等)
• S120 Training Case 6ZB2480-0BA0,

圖2 S120 Training Case
包括:
(1)CU320 6SL3040-0MA00-0AA1
(2)非調節型電源模塊5kW 6SL3130-6AE15-0AA0
(3)雙電機模塊3A 6SL3120-2TE13-0AA0
(4)同步電機(1FK7022-5AK71-1AG3),通過SMC20(6SL3055-0AA00-5BA1)接增量型編碼器(2048,Sin/Cos,1Vpp)
(5)同步電機(1FK7022-5AK71-1LG3),通過DRIVE-CLIQ接值編碼器(512 ppr,EnDat)
(6)CompactFlash Card 6SL3054-0CG01-1AA0
2.1.2 本文檔所述實例基于以下軟件環境:
• Window XP SP3
• STEP 7 V5.5 SP2
• S7 Technology V4.2 SP1
• S7 Distributed Safety V5.4 SP52)
2)如需使用故障安全功能,則需要此軟件。
2.2 任務
2.2.1 組態實例
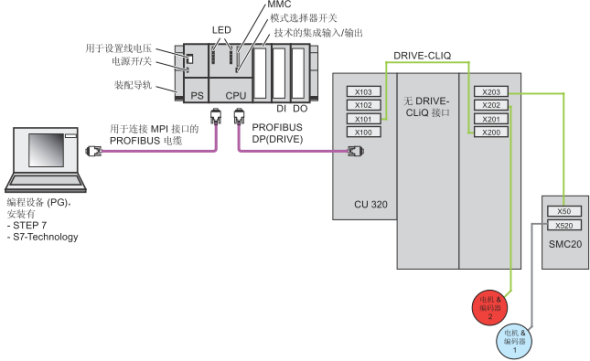
圖3 系統連接圖
2.2.2 任務
使用HW Config和S7T Config組態軸,然后借助STEP 7用戶程序操作該軸。要完成該任務請遵循以下步驟:
| 步驟 | 內容 |
| 1 | 接線 |
| 2 | 在HW Config中對CPU 317TF-2DP進行組態 |
| 3 | 更改MPI/DP接口的傳輸速率并將組態數據下載到CPU中 |
| 4 | 組態DP(DRIVE) |
| 5 | 激活生成工藝系統數據 |
| 6 | 使用HW Config對驅動器進行組態 |
| 7 | 組態通過PG/PC接口訪問驅動器 |
| 8 | 將硬件組態下載到目標硬件中 |
| 9 | 使用S7T Config組態SINAMICS驅動器 |
| 10 | 使用S7T Config組態軸工藝對象 |
| 11 | 創建工藝DB |
| 12 | 使用STEP 7用戶程序控制軸 |
| 13 | 試運行 |
表1 操作步驟列表
2.2.3 使用站向導
如果在步驟 1 之后,借助站點向導建立了 T 站點,則可以一步式執行步驟 2 到 5 ,然后接著執行步驟 6 。
3. 步驟
3.1 步驟1:接線
3.1.1 T CPU接線
請參考手冊S7-300 S7-300 CPU 數據: CPU 315T-2 DP 接線。
請嚴格按照手冊要求接線,注意安全。
3.1.2 PROFIBUS接線
用PROFIBUS電纜連接CU320到CPU 317TF-2DP的DP(DRIVE)接口,并將CU320的 PROFIBUS 地址設置為4 。可按照如下方式直接通過硬件DIP開關設置CU320的PROFIBUS 地址:

圖 4 CU320 PROFIBUS地址設置
3.2 可選:借助向導幫助建立 T 站點
組態CPU 31xT(F)時使用站向導可以一步式執行多步操作。若選擇該功能,可直接跳轉到步驟6。
操作步驟:
| 序號 | 操作 |
| 1 | 在SIMATIC Manager中建立一個新的項目 |
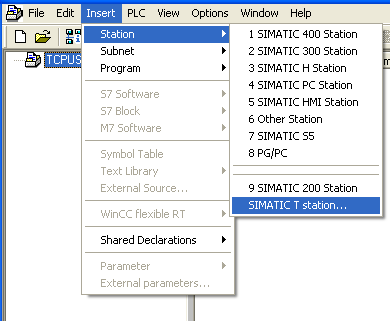
| 2 | 選擇“插入”(Insert) >“站”(Station) >“SIMATIC T 站”(SIMATIC T Station) 菜單命令。
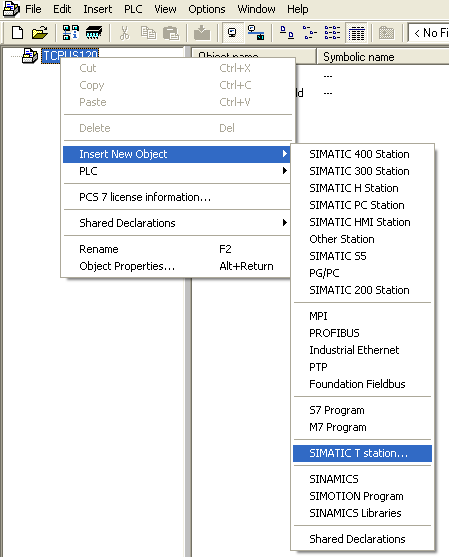
也可右擊項目名,選擇“插入新對象” (Insert New Object) >>“SIMATIC T 站”(SIMATIC T Station)
結果:“創建T站”對話框打開。 |
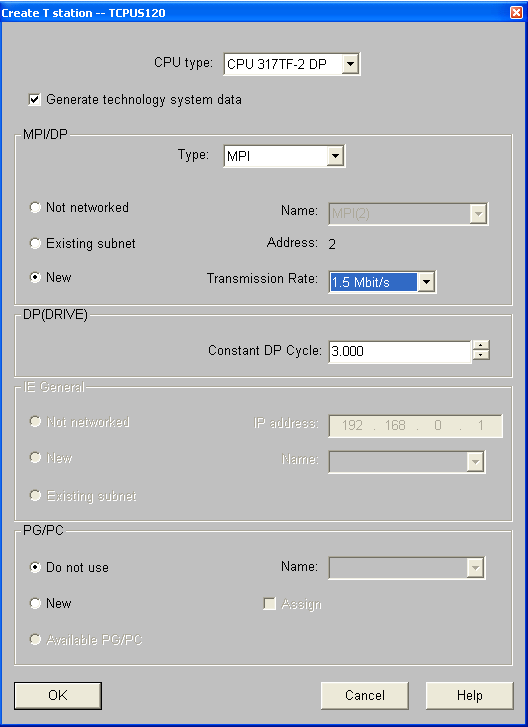
| 3 | 在“創建T站”對話框中設置以下參數: “CPU 型號”(CPU type): CPU317TF-2 DP “生成工藝系統數據”(Generate Technology System Data) 選項激活 “MPI/DP”:“新建”(New),類型 MPI,傳輸速度 1.5 Mbps “PG/PC”:未使用
點“OK”確認,STEP 7開始創建S7 300站,創建結束出現以下提示
結果:在項目中建立了包含CPU 317TF-2DP的SIMATIC 300站。 |
| 4 | 如步驟2中所述,打開硬件組態并插入其他模塊(如DI、DO等)并進行相關設置。 |
| 5 | 如步驟3中所述,將硬件組態下載到CPU中。 |
| 6 | 之后可直接跳轉到步驟6繼續以下操作。 |
3.3 步驟2:在HW Config中對CPU 317TF-2DP進行組態
操作步驟:
| 序號 | 操作 |
| 1 | 在 SIMATIC 管理器中創建新的項目(例如“TCPUS120 ( 4579 KB ) ”)并添加一個 SIMATIC 300 站點。 |
| 2 | 通過選擇“SIMATIC 300”站點并雙擊“Hardware”(硬件)打開 HW Config。 |
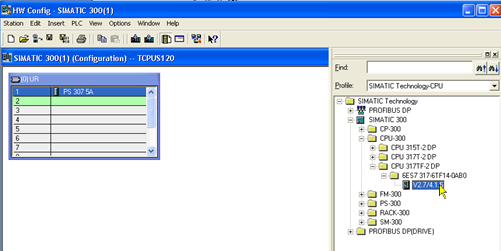
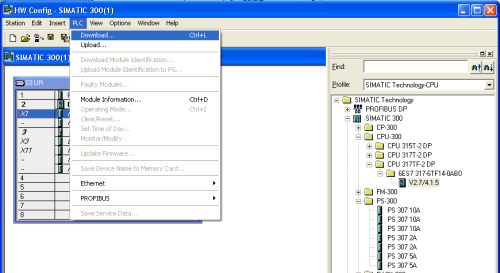
| 3 | 打開“Hardware Catalog”(硬件目錄)并在“Profile”(配置文件)下拉列表中選擇“SIMATIC Technology-CPU”硬件配置文件。
|
| 4 | 在 HW Config 的站窗口中通過拖放插入一個裝配導軌。 |
| 5 | 將“PS 307 5A”電源模塊拖放到裝配導軌上。 |
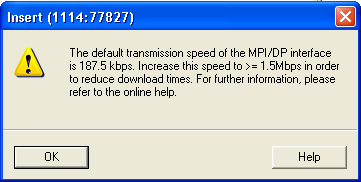
| 6 | 通過拖放將 T CPU 添加到裝配導軌。
隨后會彈出一個消息框,點“OK”確認
|
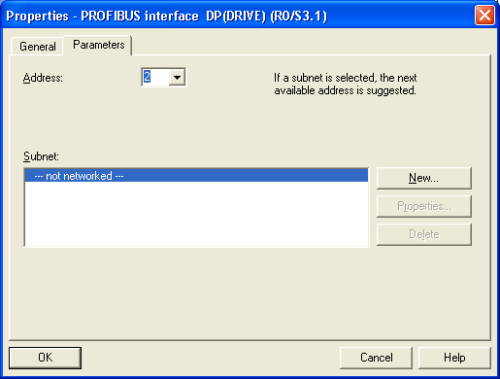
| 7 | 隨后彈出PROFIBUS接口DP(DRIVE)的屬性對話框,點“OK”確認默認設置
|
| 8 | 在S7 300站中添加其他模塊(如果有) |
3.4 步驟3:更改MPI/DP接口的傳輸速率并將組態數據下載到CPU中
操作步驟
| 序號 | 操作 |
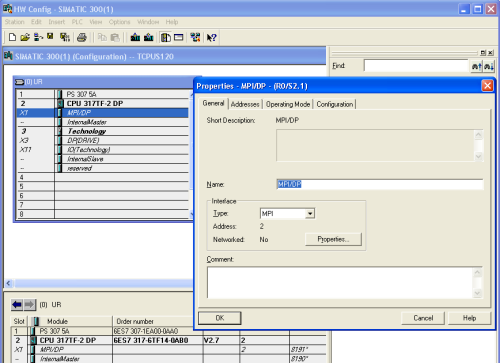
| 1 | 在裝配導軌中,雙擊“MPI/DP”以在 HW Config 中打開MPI/DP 接口 (X1)。 |
| 2 | 單擊“屬性”(Properties) 按鈕。
|
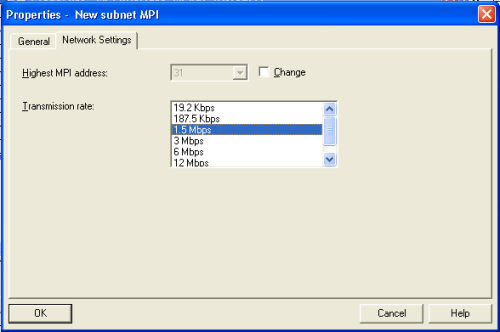
| 3 | 在彈出的對話框中,點擊“新建”創建一個新的MPI子網
|
| 4 | 在隨后彈出的對話框中的“網絡設置”標簽下,設置傳輸速率為“1.5 Mbps”。
|
| 5 | 單擊“OK”(確定),確認所有打開的對話框。 |
| 6 | 選擇SIMATIC管理器的“選項”>“設置PG/PC接口”菜單命令,選擇MPI方式連接。 |
| 7 | 選擇“PLC”>“下載”菜單命令,并在 CPU 的 STOP 模式中傳送組態。
|
| 8 | 在彈出的對話框“選擇節點地址”中,選擇CPU并點“OK”確認。
|
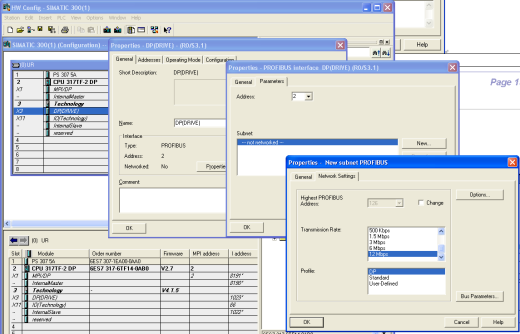
3.5 步驟4:組態DP(DRIVE)
操作步驟
| 序號 | 操作 |
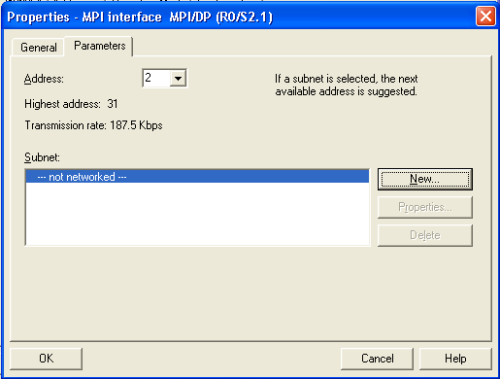
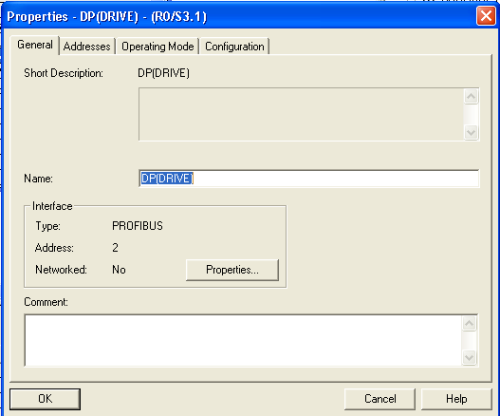
| 1 | 在安裝導軌中,雙擊“DP(驅動器)”(DP(DRIVE))以打開 HW Config 中的“屬性 - DP(驅動器)”(Properties - DP(DRIVE)) 對話框。 |
| 2 | 單擊“Properties”(屬性)按鈕。
|
| 3 | 輸入 PROFIBUS 地址“2”。 |
| 4 | 單擊“New”(新建)以創建新 PROFIBUS 子網。 |
| 5 | 在“網絡設置”(Network settings) 選項卡中,設置PROFIBUS 網絡的傳輸率。 輸入傳輸率 12 Mbps。保持子網的“DP”配置文件設置。
|
| 6 | 單擊“OK”(確定),確認 HW Config 的所有打開的對話框。 |
3.6 步驟5:激活生成工藝系統數據
操作步驟
| 序號 | 操作 |
| 1 | 雙擊裝配導軌上的“Technology” |
| 2 | 選擇“Technology system data”(工藝系統數據)標簽,然后設置“Generate technology system data”(生成工藝系統數據)復選框。 單擊“OK”確認。
如果不產生工藝系統數據,Technology CPU只能作為標準S7 300 CPU使用。 |
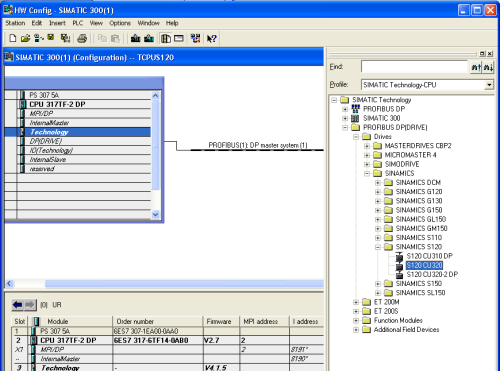
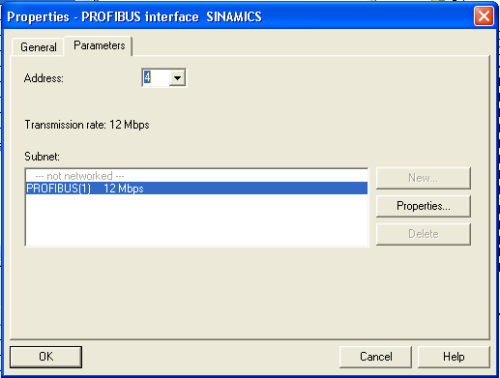
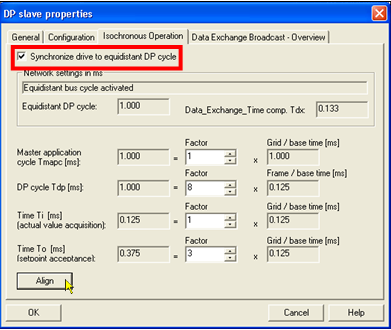
3.7 步驟6:使用HW Config對驅動器進行組態
操作步驟
| 序號 | 操作 |
| 1 | 在 HW 目錄中,打開樹形結構SIMATIC Technology > PROFIBUS DP(DRIVE) > Drives > SINAMICS > SINAMICS S120,選擇S120 CU320,并拖放到DP(DRIVE)的DP主站系統。
|
| 2 | 在彈出的對話框中輸入PROFIBUS地址“4”,然后點“OK”確認。
|
| 3 | 在彈出的對話框中為SINAMICS選擇適當的驅動器版本,然后單擊“OK”確認。
|
| 4 | 在彈出的“DP slave property”對話框中,選擇“Isochronous Operation”標簽,設置“Synchronize drive to equidistant DP cycle”,然后可設置相關事件系數,之后點擊“Align”,并點擊“OK”確認。
|
| 5 | 通過調用 Station(站)> Save and compile(保存并編譯)命令完成 HW 組態。 |
3.8 步驟7:組態通過PG/PC接口訪問驅動器
操作步驟
| 序號 | 操作 |
| 1 | 在 HW Config 中使用 Options(選項)> Configure network(組態網絡)命令啟動 NetPro 網絡組態工具。 |
| 2 | 在 HW 目錄中,打開樹形結構Stations(站點)> PG/PC,然后將 PG/PC 站點拖放到“Network View”(網絡視圖)窗口中。
|
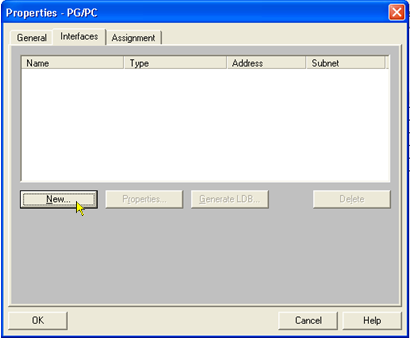
| 3 選擇新插入的 PG/PC 組件,然后單擊 Edit(編輯)> Object properties...(對象屬性...)打開“Properties – PG/PC”(屬性 — PG/PC)對話框,選擇Interface(接口)標簽。
| |
| 4 | 單擊“New...”(新建...)按鈕打開“New Interface – Type Selection”(新建接口 — 類型選擇)對話框。 選擇“MPI”,然后單擊“OK”(確定)進行確認。
|
| 5 | 在“Properties - MPI Interface”(屬性 — MPI 接口)對話框中,選擇地址“1”和“MPI network”(MPI 網絡)。 單擊“OK”(確定),確認輸入。
|
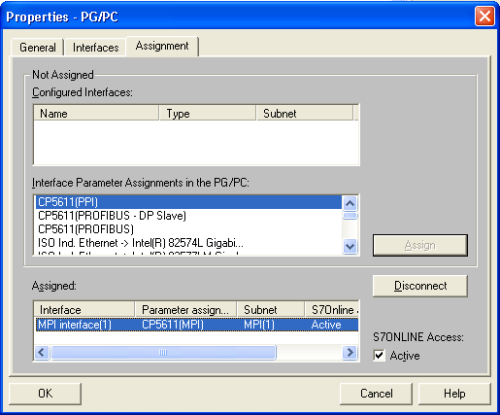
| 6 | 選擇“Properties – PG/PC”(屬性 — PG/PC)對話框中的“Assignment”(分配)標簽。通過單擊“Assign”(分配)將 PG/PC 中的 MPI 接口參數分配至已組態的接口。
|
| 7 | 單擊“OK”(確定)完成接口分配。
|
| 8 | 現在已經將 PG/PC 插入了 MPI 網絡,并滿足了與 SINAMICS S120控制單元交換數據的要求。
|
| 9 | 通過調用 Network(網絡)> Save and compile(保存并編譯)命令來完成網絡組態。選擇“Compile and check everything”(編譯并檢查全部),然后單擊“OK”(確定)進行確認。
|
| 10 | 單擊 File(文件)> Close(關閉),關閉輸出窗口。 |
| 11 | 通過調用 Network(網絡)> Exit(退出)命令關閉 NetPro 組態程序。 |
3.9 步驟8:將硬件組態下載到目標硬件中
操作步驟
| 序號 | 操作 |
| 1 | 切換回 HW Config 通過調用 PLC > Download...(下載...)命令將硬件組態下載到 CPU 中。 |
| 2 | 通過調用 Station(站)> Exit(退出)命令關閉 HW Config。 |
3.10 步驟9:使用S7T Config組態SINAMICS驅動器
操作步驟
3.10.1 自動在線組態驅動器
| 序號 | 操作 |
| 1 | 在 SIMATIC 管理器中,雙擊“Technological Objects”打開 S7T Config。
結果:“工藝對象管理”(Technology Objects Management) 打開。 如果未組態任何工藝對象(如該實例所示),系統將自動運行 S7T Config。 |
| 2 | 通過選擇 Project(項目)> Save and recompile all(全部保存并重新編譯)命令保存當前項目數據。 |
| 3 | 在打開的S7T Config中,選擇 Project(項目)> Connect to selected target system(連接到所選的目標系統)命令更改為在線模式。如果未選擇目標系統,會彈出以下對話框
選擇Technology和S120_CU320,并將Access point(接入點)設為S7ONLINE,點“OK”確認。 |
| 4 | 如果S120中有組態數據,則可能會有如下對話框,在這里直接點“Close”關閉。
|
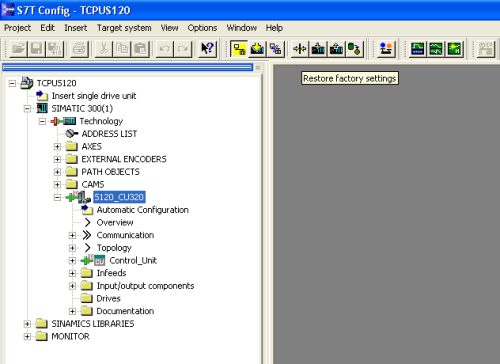
| 5 | 在S7T Config左側的項目樹中選擇S120_CU320,在工具欄中選擇Restore factory settings(恢復工廠設置)命令,執行對S120的工廠復位。
|
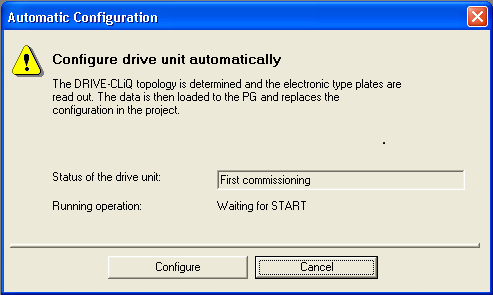
| 6 | 在項目瀏覽器中,打開樹形結構 SIMATIC 300(1) > Technology(技術)> SINAMICS_S120 > Automatic configuration(自動組態)。通過雙擊“Automatic configuration”(自動組態)打開自動組態。
|
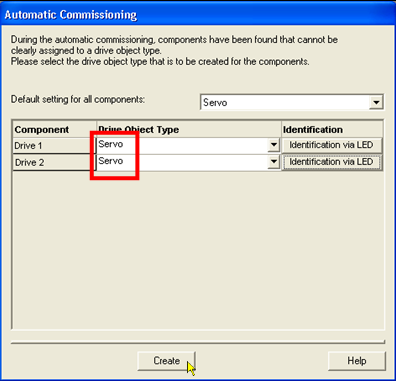
| 7 | 在“Automatic Configuration”(自動組態)對話框中點擊“Configure”啟動自動組態。
|
| 8 | 保留驅動對象的默認設置(“Servo”),點“Create”開始自動組態。
結果:兩個驅動對象自動創建組態且初始化。組態數據會自動地上載到編程設備。 |
| 9 | 自動組態結束后,點擊“Go OFFLINE”切換到離線模式。
|
3.10.2 離線組態不帶完整的DRIVE-CLIQ接口技術的Servo 03驅動器
| 序號 | 操作 |
| 1 | 在項目瀏覽器中,打開樹形結構 SIMATIC 300(1) > Technology > SINAMICS_S120 > Drives > Servo_03 > Configuration。通過雙擊“Configuration”(組態)打開離線驅動器組態。
|
| 2 | 單擊“Configure DDS...”(組態 DDS...)按鈕以啟動組態。
|
| 3 | 接受默認設置并單擊“下一步>”(Next >)。
|
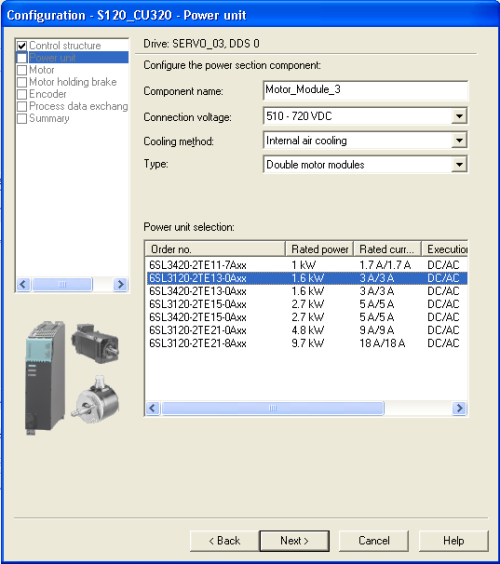
| 4 | 在功率單元對話框中,確認所有的默認參數。
|
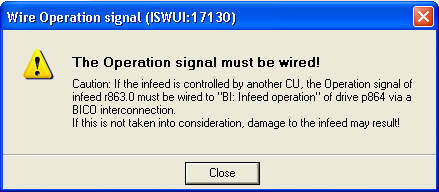
| 5 | 該 SINAMICS training case中沒有調節型電源模塊。 單擊“OK”,確認彈出的警告。
|
| 6 | 在“功率單元BICO”對話框中,選擇“Infeed in operation”為“1”,點“Next”進入下一步。
|
| 7 | 沒有完整 DRIVE-CLIQ 技術的電機被連接至功率單元的接口端子X2,點“Next”繼續。
|
| 8 | 從列表中選擇正確的電機。 要激活備選選項,必須選中“Select standard motor from list”(從列表中選擇標準電機)框。SINAMICS training case中使用的電機是 1FK7022-xAK7x-xxxx。 根據所提供的文檔或電機類型銘牌(低壓電機 — 藍色齒輪)核對此電機型號。 選擇合適的電機并單擊“下一步 >”(Next >)。
|
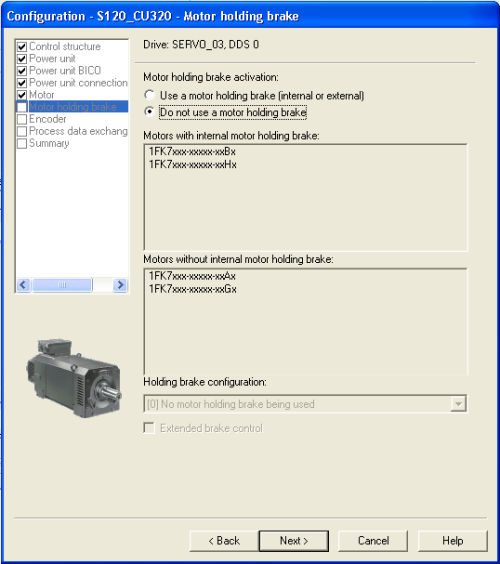
| 9 | 選擇“不使用制動閘”(Without holding brake) 并單擊“下一步 >”(Next >)。
|
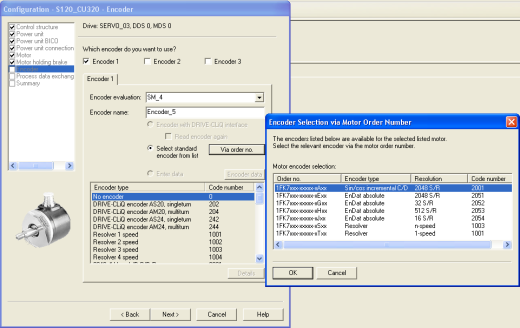
| 10 | 選擇“Encoder 1”和“Select standard encoder from list”> “Via order no.”,選擇1FK7xxx-xxxxx-xAxx。點“OK”和“Next”進入到下一步。
|
| 11 | 選擇PROFIdrive報文幀類型為“(105) SIEMENS egram 105,PZD-10/10”,并單擊“Next >”繼續。
|
| 12 | 單擊“Finish”(完成)按鈕完成離線組態,并關閉對話框。
|
3.10.3 離線組態帶帶完整的DRIVE-CLIQ接口技術的Servo 02驅動器
| 序號 | 操作 |
| 1 | 在項目瀏覽器中,打開樹形結構 SIMATIC 300(1) > Technology > SINAMICS_S120 > Drives > Servo_02 > Configuration。 雙擊“Configuration”打開離線驅動器組態。
|
| 2 | 通過單擊“Configure DDS...”(組態 DDS...)按鈕啟動組態。
|
| 3 | 參考組態“Servo_03”,組態“Servo_02” 驅動器。 功率部分具有完整的DRIVE-CLIQ技術,并已預組態好,所以電機和編碼器相關參數已經預先設置好。 |
| 4 | 有完整 DRIVE-CLIQ 技術的電機被連接至功率單元的接口端子X1
|
| 5 | 根據向導,完成Servo_02驅動器的離線組態。 |
3.10.4 離線組態Servo 03和Servo 02的報文結構
| 序號 | 操作 |
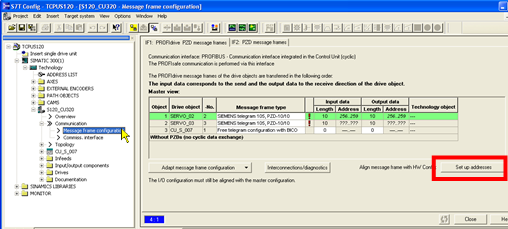
| 1 | 打開樹形結構 SIMATIC 300(1) > Technology > SINAMICS_S120 > Communication > Message frame configuration。在“SINAMICS_S120 – 組態”對話框中,將兩個消息幀類型都設置為“SIEMENS egram 105”,然后單擊“Set up address”按鈕,以在HW Config中設置報文幀地址。
|
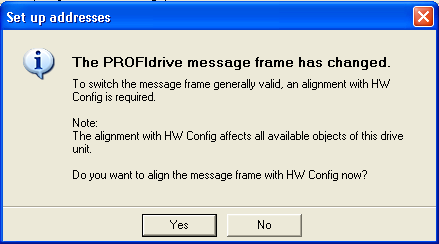
| 2 | 彈出的對話框中點“Yes”確認。
結果:
|
| 3 | 在HW Config中選擇Station > Save and Compile,保存并編譯整個站,并下載到PLC中。 注意:如果提示保存編譯錯誤,請檢查連接DP(DRIVE)的PROFIBUS時間參數。 |
| 4 | 在S7T Config中選擇 Project > Save and recompile all菜單命令,保存并編譯整個工藝項目。 |
| 5 | 在S7T Config中選擇 Project > Connect to target system菜單命令,切換到在線模式。 |
| 6 | 所需的組態位于 PG/PC 上。 在“在線/離線比較”對話框中,單擊“<== Download”按鈕,將組態傳送到驅動器。 |
| 7 | 在彈出的對話框中勾選相關選項,并點“Yes”開始下載。
|
| 8 | 點“Close”關閉“在線/離線比較”對話框。 |
3.11 步驟10:使用S7T Config組態軸工藝對象
操作步驟
| 序號 | 操作 |
| 1 | 在項目瀏覽器中,打開樹形結構 SIMATIC 300(1) > Technology > AXES。 雙擊“Insert axis”啟動軸向導:
|
| 2 | 在彈出的“Insert Axis”對話框中,保留默認設置(速度控制,定位),點“OK”確認。
|
| 3 | 在彈出的“Axis Type”對話框中,接受默認選擇,點“Next”繼續。
|
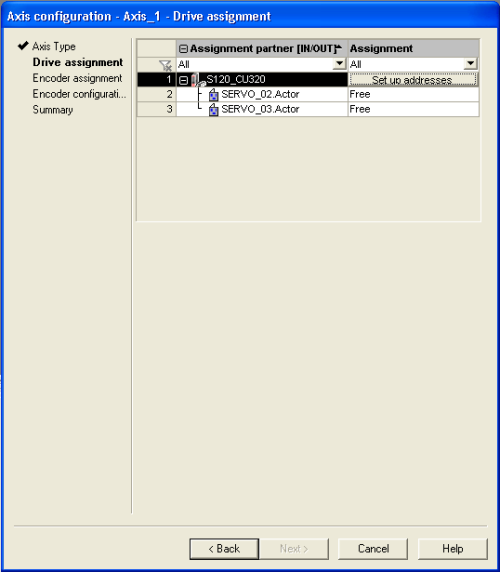
| 4 | 在“Drive assignment”對話框中,點“Set up addresses”獲取驅動器組態信息。
之后選擇組態的軸工藝對象要連接的驅動器Servo 02,點擊“Data transfer from the drive”讀取已組態好的電機的歸一化參考速度、zui大速度及zui大扭矩等參數,點“Next”進入下一步。
|
| 5 | 在彈出的“Encoder assignment”對話框中,分配驅動器帶的編碼器,并點擊“Data transfer from the drive”讀取已組態好的編碼器參數,點“Next”進入下一步。
|
| 6 | 在彈出的“Encoder configuration”對話框中,接受默認的參數,點“Next”進入到下一步。
|
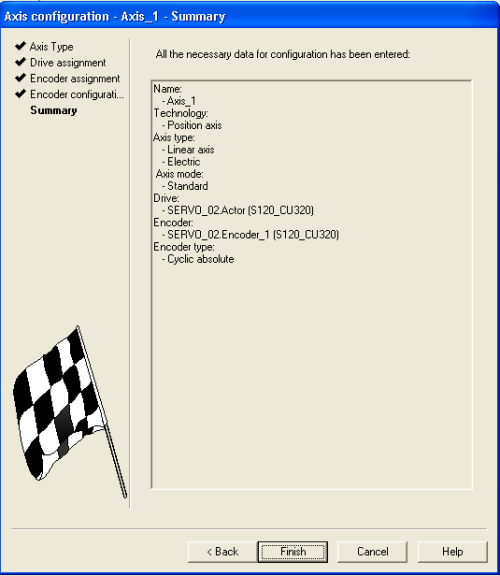
| 7 | 在彈出的“Summary”對話框中,點“Finish”結束軸組態。
|
| 8 | 如需組態另外一個軸工藝對象,可將其連接到Servo 03驅動器,組態過程參考本步驟1~7步操作。 |
| 9 | 保存編譯后將工藝數據下載到Technology CPU中。 |
3.12 步驟11:創建工藝DB
操作步驟
| 序號 | 操作 |
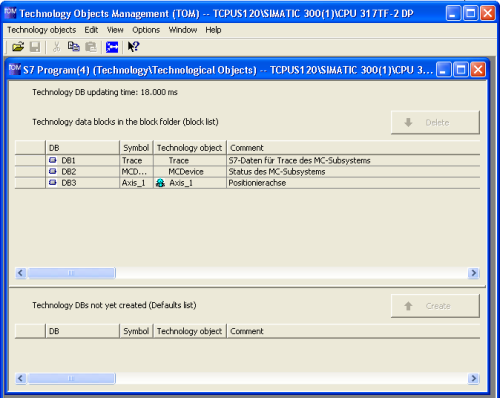
| 1 | 切換到“Technological Objects Management”(工藝對象管理)。 單擊“OK”確認消息框,。
如果尚未運行“Technological Objects Management”(技術對象管理)應用程序,則可在SIMATIC 管理器中雙擊“Technology”文件夾中的“Technological Objects”將其打開。 |
| 2 | 選中DB1~DB3,點“Create”創建工藝DB
|
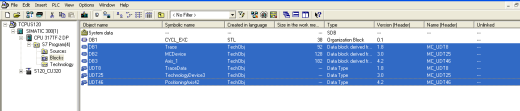
| 3 | 通過 Technological objects > Exit菜單命令關閉 Technological ObjectsManagement(工藝對象管理)。此時可看到在STEP 7管理器的Block路徑下,已經生成了工藝DB及其引用的UDT類型。
|
3.13 步驟12:使用STEP 7用戶程序控制軸
操作步驟
| 序號 | 操作 |
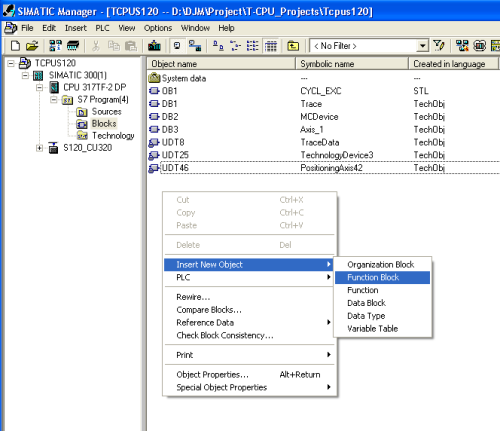
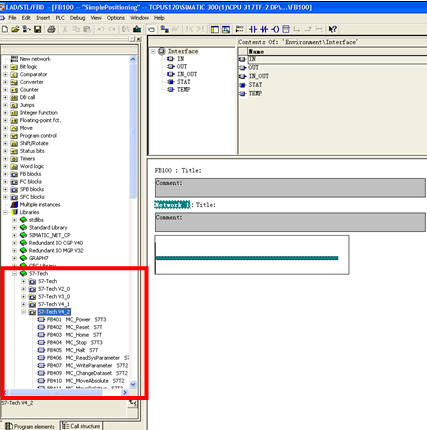
| 1 | 在STEP 7管理器的Block路徑下新建一個FB100,命名為“SimplePositioning”,打開FB100.
|
| 2 | 在程序編輯器中選擇“Library”>“S7-Tech”>“S7-Tech V4.2”,從這里可以調用系統提供的運動控制功能塊。
|
| 3 | 調用FB401“MC_Power”、FB402“MC_Reset”、FB405“MC_Halt”、FB410“MC_MoveAbsolute”等功能塊。注意在Axis引腳輸入的對應軸工藝對象的工藝DB號。
|
| 4 | 在OB1中調用FB100
|
| 5 | 在STEP 7管理器中將所有的用戶程序下載到PLC中
|
西門子模塊6ES73221CF000AA0
3.14 步驟13:試運行
| 序號 | 操作 |
| 1 | 在項目的“Blocks”文件夾中,雙擊“VAT_1”變量表。 |
| 2 | 選擇“PLC ”> “Connect to” > “Configured CPU”命令使變量表在線。 |
| 3 | 選擇“Variable”>“Monitor”切換到變量監控。 |
| 4 | 首先使能軸,然后執行MoveAbsolute,使軸運行到一個位置“Object_Position”(MD22)。 |
| 5 | 可通過MC_Halt停止軸的運行。 |
1. 產品概況
1.1 引言
自動化領域的當前發展主流趨勢是基于PLC集成的解決方案。在實現若干復雜工藝功能和運動控制的應用中,基于PLC的機電一體化1)解決方案得到了迅速的推廣,它既能為用戶提供更加靈活和更加效能的機械設備,也能大大地節約制造成本。因此,機電一體化的理念正逐漸地貫徹到越來越多的項目規劃和產品設計中。
在機電一體化方案中,注重運動控制的工藝功能在自動化系統和驅動系統中得到了廣泛的應用。西門子的Technology CPU(或稱T CPU)實現了在一個SIMATIC CPU中集成工藝和運動控制功能,它不僅可*地執行開環控制和運動控制的任務,而且能*集成在SIMATIC產品家族和TIA(Totally Integrated Automation,全集成自動化)環境之中。
作為新的SINAMICS驅動家族的一員,SINAMICS S120是滿足機器和工廠框架中高性能要求的模塊化驅動系統。S120提供了高性能的單軸和多軸驅動,憑借其擴展性和靈活性,可廣泛應用在眾多行業。
1)機電一體化(Mechatronics),結合了機械工程、計算機技術和電子技術的綜合性學科,常用于制造業的設計和開發工作。
1.2 Technology CPU產品介紹
目前西門子提供了三款T CPU(如圖1)供用戶選擇:315T-2DP、317T-2DP和317TF-2DP。CPU 315T-2DP/CPU 317T-2DP應用在運動控制和標準控制相結合的典型應用中;CPU317TF-2DP除了包含了以上兩款產品的所有功能,還提供了額外的故障安全功能,可應用在標準控制、運動控制和安全相關控制相結合的綜合應用之中。
圖1 T CPU產品家族
T CPU包括以下部分:
系統提供預編程的符合PLCopen認證的功能塊簡化了用戶的編程工作。STEP 7選件包S7-Technology可用于對所有的工藝功能進行編程和調試。
T CPU可同時處理多達32個(對于315T-2DP)或64個(對于317T(F)-2DP)工藝對象。
更多T CPU產品信息請參考支持中心提供的相關網頁。
1.3 SINAMICS S120產品介紹
Sinamics S120 是西門子公司推出的全新的集 V/F、矢量控制及伺服控制于一體的驅動控制系統,它不僅能控制普通的三相異步電動機,還能控制同步電機、扭矩電機及直線電機。其強大的定位功能將實現進給軸的、相對定位。內部集成的 DCC(驅動控制圖表)功能,用 PLC 的 CFC 編程語言來實現邏輯、運算及簡單的工藝等功能。
S120分為兩種,AC/AC(單軸驅動器)和DC/AC(多軸驅動器)。
更多S120產品信息請參考支持中心提供的相關網頁。
2. 準備
2.1 環境要求
2.1.1 本文檔所述實例基于以下硬件環境:
• PS307 5A 6ES7307-1EA00-0AA0
• CPU 317TF-2DP 6ES7317-6TF14-0AB0
• SIMATIC MMC 8M 6ES7953-8LP11-0AA0
• SIMATIC Field PG M3 6ES7715-1BB23-0AA1
• PROFIBUS電纜
• 其他S7 300模塊(如果有,如DI、DO等)
• S120 Training Case 6ZB2480-0BA0,
圖2 S120 Training Case
包括:
(1)CU320 6SL3040-0MA00-0AA1
(2)非調節型電源模塊5kW 6SL3130-6AE15-0AA0
(3)雙電機模塊3A 6SL3120-2TE13-0AA0
(4)同步電機(1FK7022-5AK71-1AG3),通過SMC20(6SL3055-0AA00-5BA1)接增量型編碼器(2048,Sin/Cos,1Vpp)
(5)同步電機(1FK7022-5AK71-1LG3),通過DRIVE-CLIQ接值編碼器(512 ppr,EnDat)
(6)CompactFlash Card 6SL3054-0CG01-1AA0
2.1.2 本文檔所述實例基于以下軟件環境:
• Window XP SP3
• STEP 7 V5.5 SP2
• S7 Technology V4.2 SP1
• S7 Distributed Safety V5.4 SP52)
2)如需使用故障安全功能,則需要此軟件。
2.2 任務
2.2.1 組態實例
圖3 系統連接圖
2.2.2 任務
使用HW Config和S7T Config組態軸,然后借助STEP 7用戶程序操作該軸。要完成該任務請遵循以下步驟:
| 步驟 | 內容 |
| 1 | 接線 |
| 2 | 在HW Config中對CPU 317TF-2DP進行組態 |
| 3 | 更改MPI/DP接口的傳輸速率并將組態數據下載到CPU中 |
| 4 | 組態DP(DRIVE) |
| 5 | 激活生成工藝系統數據 |
| 6 | 使用HW Config對驅動器進行組態 |
| 7 | 組態通過PG/PC接口訪問驅動器 |
| 8 | 將硬件組態下載到目標硬件中 |
| 9 | 使用S7T Config組態SINAMICS驅動器 |
| 10 | 使用S7T Config組態軸工藝對象 |
| 11 | 創建工藝DB |
| 12 | 使用STEP 7用戶程序控制軸 |
| 13 | 試運行 |
表1 操作步驟列表
2.2.3 使用站向導
如果在步驟 1 之后,借助站點向導建立了 T 站點,則可以一步式執行步驟 2 到 5 ,然后接著執行步驟 6 。
3. 步驟
3.1 步驟1:接線
3.1.1 T CPU接線
請參考手冊S7-300 S7-300 CPU 數據: CPU 315T-2 DP 接線。
請嚴格按照手冊要求接線,注意安全。
3.1.2 PROFIBUS接線
用PROFIBUS電纜連接CU320到CPU 317TF-2DP的DP(DRIVE)接口,并將CU320的 PROFIBUS 地址設置為4 。可按照如下方式直接通過硬件DIP開關設置CU320的PROFIBUS 地址:
圖 4 CU320 PROFIBUS地址設置
3.2 可選:借助向導幫助建立 T 站點
組態CPU 31xT(F)時使用站向導可以一步式執行多步操作。若選擇該功能,可直接跳轉到步驟6。
操作步驟:
| 序號 | 操作 |
| 1 | 在SIMATIC Manager中建立一個新的項目 |
| 2 | 選擇“插入”(Insert) >“站”(Station) >“SIMATIC T 站”(SIMATIC T Station) 菜單命令。
也可右擊項目名,選擇“插入新對象” (Insert New Object) >>“SIMATIC T 站”(SIMATIC T Station)
結果:“創建T站”對話框打開。 |
| 3 | 在“創建T站”對話框中設置以下參數: “CPU 型號”(CPU type): CPU317TF-2 DP “生成工藝系統數據”(Generate Technology System Data) 選項激活 “MPI/DP”:“新建”(New),類型 MPI,傳輸速度 1.5 Mbps “PG/PC”:未使用
點“OK”確認,STEP 7開始創建S7 300站,創建結束出現以下提示
結果:在項目中建立了包含CPU 317TF-2DP的SIMATIC 300站。 |
| 4 | 如步驟2中所述,打開硬件組態并插入其他模塊(如DI、DO等)并進行相關設置。 |
| 5 | 如步驟3中所述,將硬件組態下載到CPU中。 |
| 6 | 之后可直接跳轉到步驟6繼續以下操作。 |
3.3 步驟2:在HW Config中對CPU 317TF-2DP進行組態
操作步驟:
| 序號 | 操作 |
| 1 | 在 SIMATIC 管理器中創建新的項目(例如“TCPUS120 ( 4579 KB ) ”)并添加一個 SIMATIC 300 站點。 |
| 2 | 通過選擇“SIMATIC 300”站點并雙擊“Hardware”(硬件)打開 HW Config。 |
| 3 | 打開“Hardware Catalog”(硬件目錄)并在“Profile”(配置文件)下拉列表中選擇“SIMATIC Technology-CPU”硬件配置文件。
|
| 4 | 在 HW Config 的站窗口中通過拖放插入一個裝配導軌。 |
| 5 | 將“PS 307 5A”電源模塊拖放到裝配導軌上。 |
| 6 | 通過拖放將 T CPU 添加到裝配導軌。
隨后會彈出一個消息框,點“OK”確認
|
| 7 | 隨后彈出PROFIBUS接口DP(DRIVE)的屬性對話框,點“OK”確認默認設置
|
| 8 | 在S7 300站中添加其他模塊(如果有) |
3.4 步驟3:更改MPI/DP接口的傳輸速率并將組態數據下載到CPU中
操作步驟
| 序號 | 操作 |
| 1 | 在裝配導軌中,雙擊“MPI/DP”以在 HW Config 中打開MPI/DP 接口 (X1)。 |
| 2 | 單擊“屬性”(Properties) 按鈕。
|
| 3 | 在彈出的對話框中,點擊“新建”創建一個新的MPI子網
|
| 4 | 在隨后彈出的對話框中的“網絡設置”標簽下,設置傳輸速率為“1.5 Mbps”。
|
| 5 | 單擊“OK”(確定),確認所有打開的對話框。 |
| 6 | 選擇SIMATIC管理器的“選項”>“設置PG/PC接口”菜單命令,選擇MPI方式連接。 |
| 7 | 選擇“PLC”>“下載”菜單命令,并在 CPU 的 STOP 模式中傳送組態。
|
| 8 | 在彈出的對話框“選擇節點地址”中,選擇CPU并點“OK”確認。
|
3.5 步驟4:組態DP(DRIVE)
操作步驟
| 序號 | 操作 |
| 1 | 在安裝導軌中,雙擊“DP(驅動器)”(DP(DRIVE))以打開 HW Config 中的“屬性 - DP(驅動器)”(Properties - DP(DRIVE)) 對話框。 |
| 2 | 單擊“Properties”(屬性)按鈕。
|
| 3 | 輸入 PROFIBUS 地址“2”。 |
| 4 | 單擊“New”(新建)以創建新 PROFIBUS 子網。 |
| 5 | 在“網絡設置”(Network settings) 選項卡中,設置PROFIBUS 網絡的傳輸率。 輸入傳輸率 12 Mbps。保持子網的“DP”配置文件設置。
|
| 6 | 單擊“OK”(確定),確認 HW Config 的所有打開的對話框。 |
3.6 步驟5:激活生成工藝系統數據
操作步驟
| 序號 | 操作 |
| 1 | 雙擊裝配導軌上的“Technology” |
| 2 | 選擇“Technology system data”(工藝系統數據)標簽,然后設置“Generate technology system data”(生成工藝系統數據)復選框。 單擊“OK”確認。
如果不產生工藝系統數據,Technology CPU只能作為標準S7 300 CPU使用。 |
3.7 步驟6:使用HW Config對驅動器進行組態
操作步驟
| 序號 | 操作 |
| 1 | 在 HW 目錄中,打開樹形結構SIMATIC Technology > PROFIBUS DP(DRIVE) > Drives > SINAMICS > SINAMICS S120,選擇S120 CU320,并拖放到DP(DRIVE)的DP主站系統。
|
| 2 | 在彈出的對話框中輸入PROFIBUS地址“4”,然后點“OK”確認。
|
| 3 | 在彈出的對話框中為SINAMICS選擇適當的驅動器版本,然后單擊“OK”確認。
|
| 4 | 在彈出的“DP slave property”對話框中,選擇“Isochronous Operation”標簽,設置“Synchronize drive to equidistant DP cycle”,然后可設置相關事件系數,之后點擊“Align”,并點擊“OK”確認。
|
| 5 | 通過調用 Station(站)> Save and compile(保存并編譯)命令完成 HW 組態。 |
3.8 步驟7:組態通過PG/PC接口訪問驅動器
操作步驟
| 序號 | 操作 |
| 1 | 在 HW Config 中使用 Options(選項)> Configure network(組態網絡)命令啟動 NetPro 網絡組態工具。 |
| 2 | 在 HW 目錄中,打開樹形結構Stations(站點)> PG/PC,然后將 PG/PC 站點拖放到“Network View”(網絡視圖)窗口中。
|
| 3 選擇新插入的 PG/PC 組件,然后單擊 Edit(編輯)> Object properties...(對象屬性...)打開“Properties – PG/PC”(屬性 — PG/PC)對話框,選擇Interface(接口)標簽。
| |
| 4 | 單擊“New...”(新建...)按鈕打開“New Interface – Type Selection”(新建接口 — 類型選擇)對話框。 選擇“MPI”,然后單擊“OK”(確定)進行確認。
|
| 5 | 在“Properties - MPI Interface”(屬性 — MPI 接口)對話框中,選擇地址“1”和“MPI network”(MPI 網絡)。 單擊“OK”(確定),確認輸入。
|
| 6 | 選擇“Properties – PG/PC”(屬性 — PG/PC)對話框中的“Assignment”(分配)標簽。通過單擊“Assign”(分配)將 PG/PC 中的 MPI 接口參數分配至已組態的接口。
|
| 7 | 單擊“OK”(確定)完成接口分配。
|
| 8 | 現在已經將 PG/PC 插入了 MPI 網絡,并滿足了與 SINAMICS S120控制單元交換數據的要求。
|
| 9 | 通過調用 Network(網絡)> Save and compile(保存并編譯)命令來完成網絡組態。選擇“Compile and check everything”(編譯并檢查全部),然后單擊“OK”(確定)進行確認。
|
| 10 | 單擊 File(文件)> Close(關閉),關閉輸出窗口。 |
| 11 | 通過調用 Network(網絡)> Exit(退出)命令關閉 NetPro 組態程序。 |
3.9 步驟8:將硬件組態下載到目標硬件中
操作步驟
| 序號 | 操作 |
| 1 | 切換回 HW Config 通過調用 PLC > Download...(下載...)命令將硬件組態下載到 CPU 中。 |
| 2 | 通過調用 Station(站)> Exit(退出)命令關閉 HW Config。 |
3.10 步驟9:使用S7T Config組態SINAMICS驅動器
操作步驟
3.10.1 自動在線組態驅動器
| 序號 | 操作 |
| 1 | 在 SIMATIC 管理器中,雙擊“Technological Objects”打開 S7T Config。
結果:“工藝對象管理”(Technology Objects Management) 打開。 如果未組態任何工藝對象(如該實例所示),系統將自動運行 S7T Config。 |
| 2 | 通過選擇 Project(項目)> Save and recompile all(全部保存并重新編譯)命令保存當前項目數據。 |
| 3 | 在打開的S7T Config中,選擇 Project(項目)> Connect to selected target system(連接到所選的目標系統)命令更改為在線模式。如果未選擇目標系統,會彈出以下對話框
選擇Technology和S120_CU320,并將Access point(接入點)設為S7ONLINE,點“OK”確認。 |
| 4 | 如果S120中有組態數據,則可能會有如下對話框,在這里直接點“Close”關閉。
|
| 5 | 在S7T Config左側的項目樹中選擇S120_CU320,在工具欄中選擇Restore factory settings(恢復工廠設置)命令,執行對S120的工廠復位。
|
| 6 | 在項目瀏覽器中,打開樹形結構 SIMATIC 300(1) > Technology(技術)> SINAMICS_S120 > Automatic configuration(自動組態)。通過雙擊“Automatic configuration”(自動組態)打開自動組態。
|
| 7 | 在“Automatic Configuration”(自動組態)對話框中點擊“Configure”啟動自動組態。
|
| 8 | 保留驅動對象的默認設置(“Servo”),點“Create”開始自動組態。
結果:兩個驅動對象自動創建組態且初始化。組態數據會自動地上載到編程設備。 |
| 9 | 自動組態結束后,點擊“Go OFFLINE”切換到離線模式。
|
3.10.2 離線組態不帶完整的DRIVE-CLIQ接口技術的Servo 03驅動器
| 序號 | 操作 |
| 1 | 在項目瀏覽器中,打開樹形結構 SIMATIC 300(1) > Technology > SINAMICS_S120 > Drives > Servo_03 > Configuration。通過雙擊“Configuration”(組態)打開離線驅動器組態。
|
| 2 | 單擊“Configure DDS...”(組態 DDS...)按鈕以啟動組態。
|
| 3 | 接受默認設置并單擊“下一步>”(Next >)。
|
| 4 | 在功率單元對話框中,確認所有的默認參數。
|
| 5 | 該 SINAMICS training case中沒有調節型電源模塊。 單擊“OK”,確認彈出的警告。
|
| 6 | 在“功率單元BICO”對話框中,選擇“Infeed in operation”為“1”,點“Next”進入下一步。
|
| 7 | 沒有完整 DRIVE-CLIQ 技術的電機被連接至功率單元的接口端子X2,點“Next”繼續。
|
| 8 | 從列表中選擇正確的電機。 要激活備選選項,必須選中“Select standard motor from list”(從列表中選擇標準電機)框。SINAMICS training case中使用的電機是 1FK7022-xAK7x-xxxx。 根據所提供的文檔或電機類型銘牌(低壓電機 — 藍色齒輪)核對此電機型號。 選擇合適的電機并單擊“下一步 >”(Next >)。
|
| 9 | 選擇“不使用制動閘”(Without holding brake) 并單擊“下一步 >”(Next >)。
|
| 10 | 選擇“Encoder 1”和“Select standard encoder from list”> “Via order no.”,選擇1FK7xxx-xxxxx-xAxx。點“OK”和“Next”進入到下一步。
|
| 11 | 選擇PROFIdrive報文幀類型為“(105) SIEMENS egram 105,PZD-10/10”,并單擊“Next >”繼續。
|
| 12 | 單擊“Finish”(完成)按鈕完成離線組態,并關閉對話框。
|
3.10.3 離線組態帶帶完整的DRIVE-CLIQ接口技術的Servo 02驅動器
| 序號 | 操作 |
| 1 | 在項目瀏覽器中,打開樹形結構 SIMATIC 300(1) > Technology > SINAMICS_S120 > Drives > Servo_02 > Configuration。 雙擊“Configuration”打開離線驅動器組態。
|
| 2 | 通過單擊“Configure DDS...”(組態 DDS...)按鈕啟動組態。
|
| 3 | 參考組態“Servo_03”,組態“Servo_02” 驅動器。 功率部分具有完整的DRIVE-CLIQ技術,并已預組態好,所以電機和編碼器相關參數已經預先設置好。 |
| 4 | 有完整 DRIVE-CLIQ 技術的電機被連接至功率單元的接口端子X1
|
| 5 | 根據向導,完成Servo_02驅動器的離線組態。 |
3.10.4 離線組態Servo 03和Servo 02的報文結構
| 序號 | 操作 |
| 1 | 打開樹形結構 SIMATIC 300(1) > Technology > SINAMICS_S120 > Communication > Message frame configuration。在“SINAMICS_S120 – 組態”對話框中,將兩個消息幀類型都設置為“SIEMENS egram 105”,然后單擊“Set up address”按鈕,以在HW Config中設置報文幀地址。
|
| 2 | 彈出的對話框中點“Yes”確認。
結果:
|
| 3 | 在HW Config中選擇Station > Save and Compile,保存并編譯整個站,并下載到PLC中。 注意:如果提示保存編譯錯誤,請檢查連接DP(DRIVE)的PROFIBUS時間參數。 |
| 4 | 在S7T Config中選擇 Project > Save and recompile all菜單命令,保存并編譯整個工藝項目。 |
| 5 | 在S7T Config中選擇 Project > Connect to target system菜單命令,切換到在線模式。 |
| 6 | 所需的組態位于 PG/PC 上。 在“在線/離線比較”對話框中,單擊“<== Download”按鈕,將組態傳送到驅動器。 |
| 7 | 在彈出的對話框中勾選相關選項,并點“Yes”開始下載。
|
| 8 | 點“Close”關閉“在線/離線比較”對話框。 |
3.11 步驟10:使用S7T Config組態軸工藝對象
操作步驟
| 序號 | 操作 |
| 1 | 在項目瀏覽器中,打開樹形結構 SIMATIC 300(1) > Technology > AXES。 雙擊“Insert axis”啟動軸向導:
|
| 2 | 在彈出的“Insert Axis”對話框中,保留默認設置(速度控制,定位),點“OK”確認。
|
| 3 | 在彈出的“Axis Type”對話框中,接受默認選擇,點“Next”繼續。
|
| 4 | 在“Drive assignment”對話框中,點“Set up addresses”獲取驅動器組態信息。
之后選擇組態的軸工藝對象要連接的驅動器Servo 02,點擊“Data transfer from the drive”讀取已組態好的電機的歸一化參考速度、zui大速度及zui大扭矩等參數,點“Next”進入下一步。
|
| 5 | 在彈出的“Encoder assignment”對話框中,分配驅動器帶的編碼器,并點擊“Data transfer from the drive”讀取已組態好的編碼器參數,點“Next”進入下一步。
|
| 6 | 在彈出的“Encoder configuration”對話框中,接受默認的參數,點“Next”進入到下一步。
|
| 7 | 在彈出的“Summary”對話框中,點“Finish”結束軸組態。
|
| 8 | 如需組態另外一個軸工藝對象,可將其連接到Servo 03驅動器,組態過程參考本步驟1~7步操作。 |
| 9 | 保存編譯后將工藝數據下載到Technology CPU中。 |
3.12 步驟11:創建工藝DB
操作步驟
| 序號 | 操作 |
| 1 | 切換到“Technological Objects Management”(工藝對象管理)。 單擊“OK”確認消息框,。
如果尚未運行“Technological Objects Management”(技術對象管理)應用程序,則可在SIMATIC 管理器中雙擊“Technology”文件夾中的“Technological Objects”將其打開。 |
| 2 | 選中DB1~DB3,點“Create”創建工藝DB
|
| 3 | 通過 Technological objects > Exit菜單命令關閉 Technological ObjectsManagement(工藝對象管理)。此時可看到在STEP 7管理器的Block路徑下,已經生成了工藝DB及其引用的UDT類型。
|
3.13 步驟12:使用STEP 7用戶程序控制軸
操作步驟
| 序號 | 操作 |
| 1 | 在STEP 7管理器的Block路徑下新建一個FB100,命名為“SimplePositioning”,打開FB100.
|
| 2 | 在程序編輯器中選擇“Library”>“S7-Tech”>“S7-Tech V4.2”,從這里可以調用系統提供的運動控制功能塊。
|
| 3 | 調用FB401“MC_Power”、FB402“MC_Reset”、FB405“MC_Halt”、FB410“MC_MoveAbsolute”等功能塊。注意在Axis引腳輸入的對應軸工藝對象的工藝DB號。
|
| 4 | 在OB1中調用FB100
|
| 5 | 在STEP 7管理器中將所有的用戶程序下載到PLC中
|
3.14 步驟13:試運行
| 序號 | 操作 |
| 1 | 在項目的“Blocks”文件夾中,雙擊“VAT_1”變量表。 |
| 2 | 選擇“PLC ”> “Connect to” > “Configured CPU”命令使變量表在線。 |
| 3 | 選擇“Variable”>“Monitor”切換到變量監控。 |
| 4 | 首先使能軸,然后執行MoveAbsolute,使軸運行到一個位置“Object_Position”(MD22)。 |
| 5 | 可通過MC_Halt停止軸的運行。 |
電源模塊
6ES7 407-0DA02-0AA0 電源模塊(4A)
6ES7 407-0KA02-0AA0 電源模塊(10A)
6ES7 407-0KR02-0AA0 電源模塊(10A)冗余
6ES7 407-0RA02-0AA0 電源模塊(20A)
6ES7 405-0DA02-0AA0 電源模塊(4A)
6ES7 405-0KA02-0AA0 電源模塊(10A)
6ES7 405-0RA01-0AA0 電源模塊(20A)
6ES7 971-0BA00 備用電池
CPU
6ES7 412-3HJ14-0AB0 CPU 412-3H; 512KB程序內存/256KB數據內存
6ES7 414-4HM14-0AB0 CPU 414-4H; 冗余熱備CPU 2.8 MB RAM
6ES7 417-4HT14-0AB0 CPU 417-4H; 冗余熱備CPU 30 MB RAM
6ES7 400-0HR00-4AB0 412H 系統套件包括 2 個CPU、1個H型*機架、2個電源、2個1M 存儲卡、4個
同步模塊、2根同步電纜,以及4個備用電池(PS407 10A)
6ES7 400-0HR50-4AB0 412H 系統套件包括 2 個CPU、1個H型*機架、2個電源、2個1M 存儲卡、4個
同步模塊、2根同步電纜,以及4個備用電池(PS405 10A)
6ES7 412-1XJ05-0AB0 CPU412-1,144KB程序內存/144KB數據內存
6ES7 412-2XJ05-0AB0 CPU412-2,256KB程序內存/256KB數據內存
6ES7 414-2XK05-0AB0 CPU414-2,512KB程序內存/512KB數據內存
6ES7 414-3XM05-0AB0 CPU414-3,1.4M程序內存/1.4M數據內存 1個IF模板插槽
6ES7 414-3EM05-0AB0 CPU414-3PN/DP 1.4M程序內存/1.4M數據內存 1個IF模板插槽
6ES7 416-2XN05-0AB0 CPU416-2,2.8M程序內存/2.8M數據內存
6ES7 416-3XR05-0AB0 CPU416-3,5.6M程序內存/5.6M數據內存 1個IF模板插槽
6ES7 416-3ER05-0AB0 CPU416-3PN/DP 5.6M程序內存/5.6M數據內存 1個IF模板插槽
6ES7 416-2FN05-0AB0 CPU416F-2,2.8M程序內存/2.8M數據內存
6ES7 416-3FR05-0AB0 CPU416F-3PN/DP,5.6M程序內存/5.6M數據內存
6ES7 417-4XT05-0AB0 CPU417-4,15M程序內存/15M數據內存
內存卡
6ES7 955-2AL00-0AA0 2 X 2M字節 RAM
6ES7 955-2AM00-0AA0 2 X 4M字節 RAM
6ES7 952-0AF00-0AA0 64K字節 RAM
6ES7 952-1AH00-0AA0 256K字節 RAM
6ES7 952-1AK00-0AA0 1M字節 RAM
6ES7 952-1AL00-0AA0 2M字節 RAM
6ES7 952-1AM00-0AA0 4M字節 RAM
6ES7 952-1AP00-0AA0 8M字節 RAM
6ES7 952-1AS00-0AA0 16M字節 RAM
6ES7 952-1AY00-0AA0 64M字節 RAM
6ES7 952-0KF00-0AA0 64K字節 FLASH EPROM
6ES7 952-0KH00-0AA0 256K字節 FLASH EPROM
6ES7 952-1KK00-0AA0 1M字節 FLASH EPROM
6ES7 952-1KL00-0AA0 2M字節 FLASH EPROM
6ES7 952-1KM00-0AA0 4M字節 FLASH EPROM
6ES7 952-1KP00-0AA0 8M字節 FLASH EPROM
6ES7 952-1KS00-0AA0 16M字節 FLASH EPROM
6ES7 952-1KT00-0AA0 32M字節 FLASH EPROM
6ES7 952-1KY00-0AA0 64M字節 FLASH EPROM
開關量輸入模板
6ES7 421-7BH01-0AB0 開關量輸入模塊(16點,24VDC)中斷
6ES7 421-1BL01-0AA0 開關量輸入模塊(32點,24VDC)
6ES7 421-1EL00-0AA0 開關量輸入模塊(32點,120VUC)
6ES7 421-1FH20-0AA0 開關量輸入模塊(16點,120/230VUC)
6ES7 421-7DH00-0AB0 開關量輸入模塊(16點,24V到60VUC)
開關量輸出模板
6ES7 422-1BH11-0AA0 開關量輸出模塊(16點,24VDC,2A)
6ES7 422-1BL00-0AA0 32點輸出,24VDC,0.5A
6ES7 422-7BL00-0AB0 32點輸出,24VDC,0.5A,中斷
6ES7 422-1FH00-0AA0 16點輸出,120/230VAC,2A
6ES7 422-1HH00-0AA0 16點輸出,繼電器,5A
模擬量模塊
6ES7 431-0HH00-0AB0 16路模擬輸入,13位
6ES7 431-1KF00-0AB0 8路模擬輸入,13位,隔離
6ES7 431-1KF10-0AB0 8路模擬輸入,14位,隔離,線性化
6ES7 431-1KF20-0AB0 8路模擬輸入,14位,隔離
6ES7 431-7QH00-0AB0 16路模擬輸入,16位,隔離
6ES7 431-7KF00-0AB0 8路模擬輸入,16位,隔離,熱電偶
6ES7 431-7KF10-0AB0 8路模擬輸入,16位,隔離,熱電阻
6ES7 432-1HF00-0AB0 8路模擬輸出,13位,隔離
功能模板
6ES7 450-1AP00-0AE0 FM450-1計數器模板
6ES7 451-3AL00-0AE0 FM451定位模板
6ES7 452-1AH00-0AE0 FM452電子凸輪控制器
6ES7 453-3AH00-0AE0 FM453定位模板
6ES7 455-0VS00-0AE0 FM455C閉環控制模塊
6ES7 455-1VS00-0AE0 FM455S閉環控制模塊
6DD1 607-0AA2 FM 458-1DP快速處理系統
6ES7 953-8LJ20-0AA0 用于FM458-1DP 基本模板 512KByte(MMC)
6ES7 953-8LL20-0AA0 用于FM458-1DP 基本模板 2MByte(MMC)
6ES7 953-8LM20-0AA0 用于FM458-1DP 基本模板 4MByte(MMC)
6DD1 607-0CA1 EXM 438-1 I/O擴展模板
6DD1 607-0EA0 EXM 448 通訊擴展模板
6DD1 607-0EA2 EXM 448-2 通訊擴展模板
6DD1 684-0GE0 SC64連接電纜
6DD1 684-0GD0 SC63連接電纜
6DD1 684-0GC0 SC62連接電纜
6DD1 681-0AE2 SB10端子模塊
6DD1 681-0AF4 SB60端子模塊
6DD1 681-0EB3 SB61端子模塊
6DD1 681-0AG2 SB70端子模塊
6DD1 681-0DH1 SB71端子模塊
6DD1 681-0AJ1 SU12端子模塊
6DD1 681-0GK0 SU13端子模塊
通訊模板
6ES7 440-1CS00-0YE0 CP440通訊處理器
6ES7 441-1AA04-0AE0 CP441-1通訊處理器
6ES7 441-2AA04-0AE0 CP441-2通訊處理器
6ES7 963-1AA00-0AA0 RS232C接口模板
6ES7 963-2AA00-0AA0 20mA接口模板
6ES7 963-3AA00-0AA0 RS422/485接口模板
6ES7 870-1AA01-0YA0 可裝載驅動 MODBUS RTU 主站
6ES7 870-1AB01-0YA0 可裝載驅動 MODBUS RTU 從站
6GK7 443-5FX02-0XE0 CP443-5基本型通訊處理器,支持Profibus-Fms協議
6GK7 443-5DX04-0XE0 CP443-5擴展型通訊處理器,支持Profibus-DP協議
6GK7 443-1EX11-0XE0 CP443-1 以太網通訊處理器
6GK7 443-1EX41-0XE0 CP443-1 高級以太網通訊處理器
附件
6ES7 960-1AA04-0XA0 冗余系統同步模板(新)近距離同步(10米以內)
6ES7 960-1AB04-0XA0 冗余系統同步模板(新)遠程同步模板(10米到10公里,用同長度的光纜)
6ES7 960-1AA04-5AA0 冗余系統光纖連接電纜(1米)(新)
6ES7 960-1AA04-5BA0 冗余系統光纖連接電纜(2米)(新)
6ES7 960-1AA04-5KA0 冗余系統光纖連接電纜(10米)(新)
6ES7 833-1CC01-0YA5 S7F系統可選軟件包
6ES7 833-1CC00-6YX0 F運行*
6ES7 197-1LA03-0XA0 Y-LINK
6ES7 492-1AL00-0AA0 前連接器
6ES7 400-1TA01-0AA0 主板(18槽)
6ES7 400-1JA01-0AA0 主板(9槽)
6ES7 400-1TA11-0AA0 主板(18槽)鋁板
6ES7 400-1JA11-0AA0 主板(9槽)鋁板
6ES7 401-2TA01-0AA0 CR2主板(18槽)
6ES7 400-2JA00-0AA0 UR2-H主板(18槽)
6ES7 400-2JA10-0AA0 UR2-H主板(18槽)鋁板
6ES7 403-1TA01-0AA0 ER1機架(18槽)
6ES7 403-1JA01-0AA0 ER2機架(9槽)
6ES7 403-1TA11-0AA0 ER1機架(18槽)鋁板
6ES7 403-1JA11-0AA0 ER2機架(9槽)鋁板
6ES7 460-0AA01-0AB0 IM460-0
6ES7 461-0AA01-0AA0 IM461-0
6ES7 468-1AH50-0AA0 連接電纜 (0.75米)
6ES7 468-1BB50-0AA0 連接電纜 (1.5米)
6ES7 461-0AA00-7AA0 終端器
6ES7 460-1BA01-0AB0 IM460-1
6ES7 461-1BA01-0AA0 IM461-1
6ES7 468-3AH50-0AA0 468-3連接電纜 (0.75米)
6ES7 468-3BB50-0AA0 468-3連接電纜 (1.5米)
6ES7 460-3AA01-0AB0 IM460-3
6ES7 461-3AA01-0AA0 IM461-3
6ES7 468-1BF00-0AA0 468-1連接電纜(5米)
6ES7 468-1CB00-0AA0 468-1連接電纜(10米)
6ES7 468-1CC50-0AA0 468-1連接電纜(25米)
6ES7 468-1CF00-0AA0 468-1連接電纜(50米)
6ES7 468-1DB00-0AA0 468-1連接電纜(100米)
6ES7 461-3AA00-7AA0 終端器
6ES7 463-2AA00-0AA0 IM463-2接口模塊
6ES7 964-2AA04-0AB0 IF-964 DP接口模塊
上海朕鋅電氣設備有限公司 - 主營產品: 西門子6ES7331-7KF02-0AB0,西門子紫色電纜, ...
智能制造網設計制作,未經允許翻錄必究 Copyright(C) http://www.xashilian.com All rights reserved
以上信息由企業自行提供,信息內容的真實性、準確性和合法性由相關企業負責,智能制造網對此不承擔任何保證責任。請輸入賬號
請輸入密碼
請輸驗證碼



