




 具體成交價以合同協議為準
具體成交價以合同協議為準

¥面議

上海朔川電氣設備有限公司
 免費會員
免費會員產品介紹
西門子6SE6440-2UD34-5FB1 西門子6SE6440-2UD34-5FB1
6SE6440-2UD34-5FB1
MICROMASTER 440 無 濾波器 3AC380-480V+10/-10% 47-63Hz 恒定轉矩 45kW 過載 150% 60NO,200% 3NO 二次矩 55kW 850x 350x 320(高x寬x深) 防護等級 IP20 Umgebungstemperatur-10+50°C ohne AOP/BOP
公司名稱:上海朔川電氣設備有限公司
聯 系 人:吉夢琪
:
地址:上海市金山區涇波路129號
信譽*,客戶*是公司成立之初所確立的宗旨,在公司的嚴格要求和員工們不折不扣地貫徹執行下發展延續至今。“假一罰十”一直是我公司的主動承諾。
承諾一:1、保證全新*
承諾二:2、保證安全準時發貨
承諾三:3、保證售后服務質量
流程一:1、客戶確認所需采購產品型號
流程二:2、我方會根據詢價單型號查詢價格以及交貨期,擬一份詳細正規報價單
流程三:3,客戶收到報價單并確認型號無誤后訂購產品
流程四:4、報價單負責人根據客戶提供型號以及數量擬份銷售合同
流程五:5、客戶收到合同查閱同意后蓋章回傳并按照合同銷售額匯款到公司開戶行
流程六:6、我公司財務查到款后,業務員安排發貨并通知客戶跟蹤運單
您隨口的一問多少錢,我就立馬放下筷子趕緊回話。
您隨口的一句有沒有現貨,我就立馬進去系統拼命地找。
您隨口問了問能優惠不?我就到處想辦法。
您很隨便,我卻很當真;您不知道我的回答,只為得到您的滿意..……
只因為我和您不止是客戶的關系,而是把您當我的朋友,在全力以赴做到我能做到的
您的選擇您的支持是我zui大的動力! ————致我親愛的客戶(好朋友)
產品簡述:質保一年,一年內因產品質量問題免費更新產品不收取任何費用
哪里有賣 要多少錢 哪里有 哪里能買到 要在哪里買 在哪里有賣的 價格,參數,型號,哪家便宜,比較便宜,哪里有,銷售,訂貨號,多少錢?哪家價格好? 廠家,性能,優點,包裝,用途,售后服務!哪里有賣 代理商 總代理商
1. USS通信介紹
1.1. USS協議特點
USS (Universal Serial Interface, 即通用串行通信接口) 是西門子專為驅動裝置開發的通信協議。USS 協議的基本特點如下:
• 支持多點通信(因而可以應用在 RS 485 等網絡上)
• 采用單主站的“主-從”訪問機制
• 每個網絡上zui多可以有 32 個節點(zui多 31 個從站)
• 簡單可靠的報文格式,使數據傳輸靈活高效
• 容易實現,成本較低
USS 的工作機制是,通信總是由主站發起,USS 主站不斷循環輪詢各個從站,從站根據收到的指令,決定是否以及如何響應。從站永遠不會主動發送數據。從站在以下條件滿足時應答:
-- 接收到的主站報文沒有錯誤,并且
-- 本從站在接收到主站報文中被尋址
上述條件不滿足,或者主站發出的是廣播報文,從站不會做任何響應。對于主站來說,從站必須在接收到主站報文之后的一定時間內發回響應。否則主站將視為出錯。
USS 的字符傳輸格式符合 UART 規范,即使用串行異步傳輸方式。USS 在串行數據總線上的字符傳輸幀為 11 位長度,如表1所示:

表1:USS字符幀
USS 協議的報文簡潔可靠,高效靈活。報文由一連串的字符組成,協議中定義了它們的特
定功能,表2所示:

表2:USS報文結構
每小格代表一個字符(字節)。其中:
STX: 起始字符,總是 02 h
LGE: 報文長度
ADR:從站地址及報文類型
BCC: BCC 校驗符
凈數據區由 PKW 區和 PZD 區組成,如表3所示:

表3:USS凈數據區
PKW: 此區域用于讀寫參數值、參數定義或參數描述文本,并可修改和報告參數的改變 。其中:
- PKE: 參數 ID。包括代表主站指令和從站響應的信息,以及參數號等
- IND: 參數索引,主要用于與 PKE 配合定位參數
- PWEm:參數值數據
PZD: 此區域用于在主站和從站之間傳遞控制和過程數據。控制參數按設定好的固定格式在主、從站之間對應往返。如:
- PZD1:主站發給從站的控制字/從站返回主站的狀態字
- PZD2: 主站發給從站的給定/從站返回主站的實際反饋
根據傳輸的數據類型和驅動裝置的不同,PKW 和 PZD 區的數據長度都不是固定的,它們可以靈活改變以適應具體的需要。但是,在用于與控制器通信的自動控制任務時,網絡上的所有節點都要按相同的設定工作,并且在整個工作過程中不能隨意改變。
注意:
對于不同的驅動裝置和工作模式,PKW 和 PZD 的長度可以按一定規律定義。 一旦確定就不能在運行中隨意改變 ;
PKW 可以訪問所有對 USS 通信開放的參數;而 PZD 僅能訪問特定的控制和過程數據;
PKW 在許多驅動裝置中是作為后臺任務處理,因此 PZD 的實時性要比 PKW 好。
1.2. S7-1200 USS通信簡介
CM 1241 RS485 模塊通過 RS485 端口與MM440進行通信。 可使用 USS 庫控制MM440和讀/寫MM440參數。該庫提供 1 個 FB 和 3 個 FC 來支持 USS 協議。 每個 CM1241 RS485 通信模塊zui多支持 16 個MM440。連接到一個 CM 1241 RS485 的所有MM440(zui多 16 個)是同一 USS 網絡的一部分。連接到另一 CM 1241 RS485 的所有MM440是另一 USS 網絡的一部分。 因為 S7-1200zui多支持三個 CM 1241 RS485 設備,所以用戶zui多可建立三個 USS 網絡,每個網絡zui多 16 個MM440,總共支持 48 個 USS MM440。各 USS 網絡使用各自*的數據塊進行管理(使用三個 CM 1241 RS485 設備建立三個 USS網絡需要三個數據塊)。 同一USS 網絡相關的所有指令必須共享該數據塊。 這包括用于控制網絡上所有MM440的 USS_DRV、USS_PORT、USS_RPM 和USS_WPM 指令。
2. 硬件需求及接線
2.1. 硬件需求
S7-1200 PLC目前有3種類型的CPU:
1)S7-1211C CPU。
2)S7-1212C CPU。
3)S7-1214C CPU。
這三種類型的CPU都可以使用USS通信協議通過通信模塊CM1241 RS485來實現S7-1200與MM440變頻器的通信。
本例中使用的PLC硬件為:
1) S7-1214C ( 6ES7 214 -1BE30 -0B0 )
2) CM1241 RS485 ( 6ES7 241 -1CH30 -0B0 )
3) CSM 1277 ( 6GK7 277 -1AA00 - 0AA0)
本例中使用的MM440變頻器硬件為:
1) MM440 ( 6SE6440 - 2AB11 - 2AA1 )
2) MICROMASTER 4 ENCODER MODULE ( 6SE6400 - 0EN00 - 0AA0 )
3) SIEMENS MOTOR ( 1LA7060 - 4AB10 - Z )
4) USS 通信電纜 ( 6XV1830 - 0EH10 )
2.2. 接線
建議使用西門子的網絡插頭和PROFIBUS電纜。在 S7-1200 CPU 通信口上使用西門子網絡插頭。
PROFIBUS 電纜的紅色導線B 即 RS 485 信號 +,此信號應當連接到 MM 440 通信端口的 P+;綠色導線A 即 RS 485 信號 -,此信號應當連接到 MM 440 通信端口的 N-。
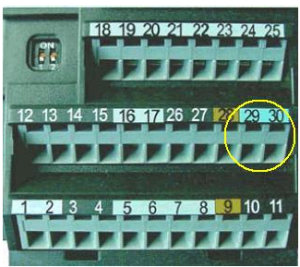

圖1: MM440接線端子 表4:MM440端子定義
因為MM 440 通信口是端子連接,所以 PROFIBUS 電纜不需要網絡插頭,而是剝出線頭直接壓在端子上。如果還要連接下一個驅動裝置,則兩條電纜的同色芯線可以壓在同一個端子內。PROFIBUS 電纜的紅色芯線應當壓入端子 29;綠色芯線應當連接到端子 30,如圖1、表4所示。完整接線圖如圖2所示。

圖2: S7-1200與MM440接線圖
a. 屏蔽/保護接地母排,或可靠的多點接地。此連接對抑制干擾有重要意義。
b. PROFIBUS 網絡插頭,內置偏置和終端電阻。
c. MM 440 端的偏置和終端電阻。
d. 通信口的等電位連接。可以保護通信口不致因共模電壓差損壞或通信中斷。
e. 雙絞屏蔽電纜(PROFIBUS)電纜,因是高速通信,電纜的屏蔽層須雙端接地(接 PE)。
注意,以下幾點對網絡的性能有極為重要的影響。幾乎所有網絡通信質量方面的問題都與未考慮到下列事項有關:
• 偏置電阻用于在復雜的環境下確保通信線上的電平在總線未被驅動時保持穩定;終端電阻用于吸收網絡上的反射信號。一個完善的總線型網絡必須在兩端接偏置和終端電阻。
• 通信口 M 的等電位連接建議單獨采用較粗的導線 ,而不要使用 PROFIBUS 的屏蔽層,因為此連接上可能有較大的電流,以致通信中斷。
• PROFIBUS 電纜的屏蔽層要盡量大面積接 PE。一個實用的做法是在靠近插頭、接線端子處環剝外皮,用壓箍將裸露的屏蔽層壓緊在 PE 接地體上(如 PE 母排或良好接地的裸露金屬安裝板)。
• 通信線與動力線分開布線;緊貼金屬板安裝也能改善抗*力。驅動裝置的輸入/輸出端要盡量采用濾波裝置,并使用屏蔽電纜。
• 在 MM 440 的包裝內提供了終端偏置電阻元件,接線時可按說明書直接壓在端子上。如果可能,可采用熱縮管將此元件包裹,并適當固定。
3. 組態
我們通過下述的實際操作來介紹如何在Step7 Basic V10.5 中組態S7-1214C 和MM440變頻器的USS通信。
3.1. PLC 硬件組態
首先在Step7 Basic V10.5中建立一個項目,如圖3所示。

圖3: 新建S7 1200項目
在硬件配置中,添加CPU1214C和通信模塊CM1241 RS485模塊,如圖4所示:

圖4: S7 1200硬件配置
在CPU的屬性中,設置以太網的IP地址,建立PG與PLC的連接,如圖5所示。

圖5: S7 1200 IP地址的設置
3.2. MM440參數設置
我們假定已經完成了驅動裝置的基本參數設置和調試(如電機參數辨識等等),以下只涉及與 S7-1200 控制器連接相關的參數。
MM 440 的參數分為幾個訪問級別,以便于過濾不需要查看的部分。 與 S7-1200 連接時,需要設置的主要有“控制源”和“設定源”兩組參數。要設置此類參數,需要“專家”參數訪問級別,即首先需要把 P0003 參數設置為 3。
控制源參數設置:
控制命令控制驅動裝置的啟動、停止、正/反轉等功能。控制源參數設置決定了驅動裝置從何種途徑接受控制信號,如表5所示。

表5:控制源由參數 P0700 設置
此參數有分組,在此僅設*組,即 P0700[0]。
設定源控制參數:
設定值控制驅動裝置的轉速/頻率等功能。設定源參數決定了驅動裝置從哪里接受設定值(即給定),如表6所示。

表6:設定源由參數 P1000 設置
此參數有分組,在此僅設*組,即 P1000[0]。
控制源和設定源之間可以自由組合,根據工藝要求可以靈活選用。我們以控制源和設定源都來自 COM link 上的 USS 通信為例,簡介 USS 通信的參數設置。
主要參數有:
1. P0700: 設置 P0700[0] = 5,即控制源來自 COM link 上的 USS 通信;
2. P1000: 設置 P1000[0] = 5,即設定源來自 COM link 上的 USS 通信;
3. P2009: 決定是否對 COM link 上的 USS 通信設定值規格化,即設定值將是運轉頻率的百分比形式,還是頻率值。為0,不規格化 USS 通信設定值,即設定為MM440中的頻率設定范圍的百分比形式;為1,對 USS 通信設定值進行規格化,即設定值為的頻率數值;
4. P2010: 設置 COM link 上的 USS 通信速率。根據 S7-1200 通信口的限制,支持的通信波特率如表7所示。
| 4 | 2400 bit/s |
| 5 | 4800 bit/s |
| 6 | 9600 bit/s |
| 7 | 19200 bit/s |
| 8 | 38400 bit/s |
| 9 | 57600 bit/s |
| 12 | 115200 bit/s |
表7:通信波特率
5. P2011: 設置 P2011[0] = 0 至 31,即驅動裝置 COM link 上的 USS 通信口在網絡上的從站地址;
6. P2012: 設置 P2012[0] = 2,即 USS PZD 區長度為 2 個字長;
7. P2013: 設置 P2013[0] = 4;
8. P2014: 設置 P2014[0] = 0 至 65535,即 COM link 上的 USS 通信控制信號中斷超時時間,單位為 ms;如設置為 0,則不進行此端口上的超時檢查;
9. P0971: 設置 P0971 = 1,上述參數將保存入MM 440 的 EEPROM 中。
4. USS通信原理與編程的實現
4.1 S7 1200 PLC與MM440 通過USS通信的基本原理
S7 1200提供了的USS庫進行USS通信,如圖6所示:

圖6:S7 1200 的USS庫
USS_DRV功能塊通過USS_DRV_DB數據塊實現與USS_PORT功能塊的數據接收與傳送,而USS_PORT功能塊是S7-1200 PLC CM1241 RS485模塊與MM440之間的通信接口。USS_RPM功能塊和USS_WPM功能塊與MM440的通信與USS_DRV功能塊的通信方式是相同的。如圖7所示。

圖7:通信結構圖
4.2. 功能塊使用介紹
USS_DRV 功能塊是S7-1200 USS通信的主體功能塊,接受MM440的信息和控制MM440的指令都是通過這個功能快來完成的。必須在主 OB中調用。
USS_PORT功能塊是S7-1200與MM440進行USS通信的接口,主要設置通信的接口參數。可在主OB或中斷OB中調用。
USS_RPM功能塊是通過USS通信讀取MM440的參數。必須在主 OB中調用。
USS_WPM功能塊是通過USS通信設置MM440的參數。必須在主 OB中調用。
4.3. S7 1200 PLC進行USS通信的編程
4.3.1. USS_DRV功能塊的編程
USS_DRV功能塊的編程如圖8所示。

圖8: USS_DRV功能塊的編程
USS_DRV功能塊用來與MM440進行交換數據,從而讀取MM440的狀態以及控制MM440的運行。每個MM440使用*的一個USS_DRV功能塊,但是同一個CM1241 RS485模塊的USS網絡的所有MM440(zui多16個)都使用同一個USS_DRV_DB。
| USS_DRV_DB: MM440進行USS通信的數據塊。 | |||||
| RUN: DB塊的MM440啟動指令。 | |||||
| OFF2: 緊急停止,自由停車。 該位為0時停車。 | |||||
| OFF3: 快速停車,帶制動停車。該位為0時停車。 | |||||
| F_ACK: MM44*確認。 | |||||
| DIR : MM440控制電機的轉向。 | |||||
| SPEED_SP: MM440的速度設定值。 | |||||
| NDR: 新數據就緒。 | |||||
| ERROR: 程序輸出錯誤。 | |||||
| RUN_EN: MM440運行狀態指示。 | |||||
| D_DIR: MM440運行方向狀態指示。 | |||||
| INHIBIT: MM440是否被禁止的狀態指示。 | |||||
| FAULT: MM44*。 | |||||
| SPEED: MM440的反饋的實際速度值。 | |||||
| DRIVE: MM440的USS站地址。MM440參數P2011設置。 | |||||
| PZD_LEN: PZD數據的字數,有效值2,4,6或8個字。MM440參數P2012設置。 | |||||
4.3.2. USS通信接口參數功能塊的編程
USS通信接口參數功能塊的編程如圖9所示。

圖9: USS通信接口參數功能塊的編程
USS_PORT功能塊用來處理USS網絡上的通信,它是S71200 CPU與MM440的通信接口。每個CM1241 RS485模塊有且必須有一個USS_PORT功能塊。
PORT: 通信模塊標識符:在默認變量表的“常量”(Constants) 選項卡內引用的常量。
BAUD: 指的是和MM440進行通行的速率。 MM440的參數P2010種進行設置。
USS_DB: 引用在用戶程序中放置 USS_DRV 指令時創建和初始化的背景數據塊。
ERROR: 輸出錯誤。
STATUS:掃描或初始化的狀態。
USS_PORT 功能通過RS485通信模塊處理 CPU 和變頻器之間的實際通信。 每次調用此功能可處理與一個變頻器的一次通信。 用戶程序必須盡快調用此功能以防止與變頻器通信超時。 可在主 OB 或任何中斷 OB 中調用此功能。通常從循環中斷 OB 調用USS_PORT 以防止變頻器超時以及使 USS_DRV 調用的 USS 數據保持。
S7-1200 PLC與MM440的通信是與它本身的掃描周期不同步的,在完成一次與MM440的通信事件之前,S7-1200通常完成了多個掃描。
USS_PORT通信的時間間隔是S7-1200與MM440通信所需要的時間,不同的通信波特率對應的不同的USS_PORT通信間隔時間。表8列出了不同的波特率對應的USS_PORTzui小通信間隔時間。

表8:不同的波特率對應的USS_PORTzui小通信間隔時間
USS_PORT在發生通信錯誤時,通常進行3次嘗試來完成通信事件,那么S7-1200與MM440通信的時間就是USS_PORT發生通信超時的時間間隔。例如:如果通信波特率是9600,那么USS_PORT與MM440通信的時間間隔應當大于zui小的調用時間間隔,即大于116.3毫秒而小于349毫秒。S7-1200 USS 協議庫默認的通信錯誤超時嘗試次數是2次。
基于以上的USS_PORT通信時間的處理,建議在循環中斷OB塊中調用USS_PORT通信功能塊。在建立循環中斷OB塊時,我們可以設置循環中斷OB塊的掃描時間,以滿足通信的要求。循環中斷OB塊的掃描時間的設置如圖10所示:

圖10:循環中斷OB塊的掃描時間的設置
4.3.3. USS_RPM功能塊的編程
USS_RPM功能塊的編程 如圖11所示。

圖11:USS_RPM功能塊的編程
USS_RPM功能塊用于通過USS通信從MM440讀取參數。
| REQ: 讀取參數請求。 | |||
| DRIVE: MM440的USS站地址。 | |||
| PARAM: MM440的參數代碼。 | |||
| INDEX: MM440的參數索引代碼 | |||
| USS_DB:MM440進行USS通信的數據塊。 | |||
| DONE: 讀取參數完成。 | |||
| ERROR: 讀取參數錯誤。 | |||
| STATUS:讀取參數狀態代碼。 | |||
| VALUE: 所讀取的參數的值。 | |||
注意:進行讀取參數功能塊編程時,各個數據的數據類型一定要正確對應。
4.3.4. USS_WPM功能塊的編程
USS_WPM功能塊的編程如圖12所示。

圖12:USS_WPM功能塊的編程
USS_WPM功能塊用于通過USS通信設置MM440的參數。
| REQ: 寫參數請求。 | |||
| DRIVE: MM440的USS站地址。 | |||
| PARAM: MM440的參數代碼。 | |||
| INDEX: MM440的參數索引代碼。 | |||
| EEPROM:把參數存儲到MM440的EEPROM。 | |||
| VALUE: 設置參數的值。 | |||
| USS_DB:MM440進行USS通信的數據塊。 | |||
| DONE: 讀取參數完成。 | |||
| ERROR: 讀取參數錯誤狀態。 | |||
注意:對寫入參數功能塊編程時,各個數據的數據類型一定要正確對應。
4.3.5. 常見錯誤
如果讀寫同時使能,則報錯818A:參數請求通道正在被本變頻器的另一請求占用。如圖13所示。

圖13:讀寫同時使能報錯
如果通信斷開,則PORT報錯818B,如圖14所示。

圖14:通信斷開報錯
如果速度設定值不正確,則報錯8186,如圖15所示。

圖15:速度設定值錯誤
1、MM440的DP通訊功能簡介
MM440變頻器既支持和主站的周期性數據通訊,也支持和主站的非周期性數據通訊,即S7-300可以使用功能塊SFC14/SFC15讀取和修改MM440參數值,調用一次可以讀取或者修改一個參數。同時也可以使用功能塊SFC58/SFC59或者SFB52/SFB53讀取和修改MM440參數值,一次zui多可以讀取或者修改39個參數。
2、MM440周期性數據通訊的報文說明
MM440周期性數據通訊報文有效 數據區域由兩部分構成,即PKW區(參數識別ID-數值區)和PZD區(過程數據),見表1。PKW區zui多占用4個字,即PKE(參數標識符值:占用一個字)、IND(參數的下標:占用一個字)、PWE1和PWE2(參數數值:共占用兩個字)。S7-300使用功能塊SFC14/SFC15讀取和修改參數需要占用4個PKW,即調用一次功能塊可以修改一個參數。PKW區的說明見表2。下面分別介紹一下PKW區的四個字。

表1
 SIEMENS
SIEMENS
表2
(1)*個字PKE:參數識別標識ID,見表3。

表3
參數識別標記ID(PKE)總是一個16位的值,位0~10(PNU)包括所請求的參數號碼,位11(SPM)用于參數變更報告的觸發位,位12~15(AK)包括任務識別標記ID(見表4)和應答識別標記ID(見表5)。

表4

表5
(2)第二個字IND:參數的下標
完整的參數號碼是由基本參數號碼和下標(PNU頁號)中的位12-15產生,見表6。因為MM440參數號碼沒有超過4000,所以在讀取和修改參數號為2000到3999時位15-12中必須為1。

表6
(3)第三個字PWE1和第四個字PWE2:參數數值,見表7。
總是以雙字(32位)來傳送參數值(PWE)。在PPO報文中,僅一個參數值能被傳送。由PWE1(高位有效字:第三個字)和PWE2(低位有效字:第四個字)組成一個32位參數值。用PWE2(低位有效字:第四個字)傳送一個16位參數值,這種情況下,必須在PROFIBUS-DP主站中,設定PWE1(高位有效字:第三個字)為零。

表7
- 位0到15(PWE2):用于16位參數的參數值或用于32位參數的低位部分。
- 位16到31(PWE1):用于等于零的1位參數或用于32位參數的高位部分。
3、MM440非周期性數據通訊的報文說明
MM440支持非周期通訊方式,即擴展的PROFIBUS DP(DPV1)功能,一次zui多可以傳送240個字節,傳輸數據塊的內容應遵照 PROFIdrive Profile, version 4.0(with data block 47 (DS47))非周期參數通道結構。它包括參數請求和參數應答兩部分。
(1)參數請求包括請求標題、參數地址和參數值,見表8。
| 項目 | 數據類型 | 數值 | 注釋 |
| 請求參考 | 無符號8 位數 | 001 … 0FF | 每一次新的請求主站改變“請求參考“,從站在其應答時鏡像“請求參考“ |
| 請求ID | 無符號8位數 | 001 | 讀請求 |
| 002 | 寫請求 | ||
| 設備ID | 無符號8位數 | 000 … 0FF | 對于多個驅動單元設定相應設備ID |
| 參數數量 | 無符號8位數 | 001 … 027 | …39,對于請求多個參數時的參數數量,=1為請求一個參數 |
| 屬性 | 無符號8位數 | 010 | 數值型 |
| 020 | 描述型 | ||
| 030 | 文本型(不可能) | ||
| 元素數量 | 無符號8位數 | 000 | 特定功能 |
| 001 … 075 | No. 1 … 117,數組數量 | ||
| 參數值 | 無符號16位數 | 00001 … 0FFFF | No. 1 … 65535 |
| 下標 | 無符號16位數 | 00001 … 0FFFF | No. 1 … 65535 |
| 格式 | 無符號8位數 | 002 | 8位整形數 |
| 003 | 16位整形數 | ||
| 004 | 32位整形數 | ||
| 005 | 無符號8位數 | ||
| 006 | 無符號16位數 | ||
| 007 | 無符號32位數 | ||
| 008 | 浮點數 | ||
| Other values | 見 PROFIdrive Profile | ||
| 040 | 0 | ||
| 041 | 字節 | ||
| 042 | 字 | ||
| 043 | 雙字 | ||
| 044 | 錯誤 | ||
| 數值號 | 無符號8位數 | 000 … 0EA | 0..234 |
| 數值 | 無符號16位數 | 00000 … 000FF | 讀或寫的參數值 |
表8
(2)參數應答描述見表9:
| 錯誤值 | 含義 | 注釋 |
| 000 | 無效的參數號 | 獲取不存在的參數 |
| 001 | 參數值不能被改變 | 修改了一個不允許修改的參數 |
| 002 | 超出上下限 | 修改的數值超限 |
| 003 | 無效的下標 | 獲取不存在的下標 |
| 004 | 沒有數組 | 用下標獲取不存在下標的參數 |
| 005 | 數據類型不正確 | |
| 006 | 無效的設定操作(參數只能設定為0) | |
| 007 | 描述的元素不能被修改 | 修改了不能被修改的元素 |
| 009 | 沒有描述的數據 | 獲取不存在的參數 |
| 00B | 沒有操作權限 | |
| 00F | 下一個數組不存在 | 獲取下一個不存在的數組 |
| 011 | 變頻器運行時不能執行請求任務 | |
| 014 | 無效數值 | |
| 015 | 應答長度太長 | 當前的應答長度超出zui大傳輸長度 |
| 016 | 無效的參數地址 | |
| 017 | 無效的數據格式 | |
| 018 | 數據數量不* | |
| 019 | 驅動裝置不存在 | |
| 020 | 文字類型的參數不能被改變 |
表9
4、硬件組態和站地址設置
本例中主站選用的是CPU319F-3 PN/DP,版本為V2.6,從站MM440的DP地址為5,MM440的版本為V2.09,選擇的報文結構是PPO1,即含有4個PKW和2個PZD,見圖1。也可以選擇其他報文類型,只要含有4個PKW就可以,見圖2。本例中PKW的地址范圍是256~263,PZD的地址范圍是264~267。


圖1 圖2
5、周期性DP通訊讀取和修改參數例程
首先在主程序OB塊中調用SFC14(讀取參數)和SFC15(修改參數),功能塊中LADDR為W#16#100,實際就是PKW的起始地址,DB1.DBB 0開始的8個字節是讀到的值,DB1.DBB 24開始的8個字節是需要修改的參數值,見圖3。M20.0為使能位,同時需要建一個DB1塊。因為參數2000以下和2000以上的報文中IND不同,本文則以實例分別介紹如何讀取和修改MM440的單字、雙字和浮點數的三種參數類型。

圖3
修改和讀取2000以上參數方法:在下面的圖中上部紅色框中為實際修改后的值,由功能塊SFC14讀回來,下部紅色框中為希望修改參數值的報文。
(1) 單字:修改參數P2010[1]為6,見圖4。
修改參數請求報文
PKE=DB1.DBW 24=200A
IND=DB1.DBW 26=0180
PWE1=DB1.DBW 28=0000
PWE2=DB1.DBW 30=0006
實際應答報文
PKE=DB1.DBW 0=100A
IND=DB1.DBW 2=0180
PWE1=DB1.DBW 4=0
PWE2=DB1.DBW 6=6

圖4
(2) 雙字:修改參數P2200[1]為1,見圖5。
修改參數請求報文
PKE=DB1.DBW 24=80C8
IND=DB1.DBW 26=0180
PWE1=DB1.DBW 28=0001
PWE2=DB1.DBW 30=0000
實際應答報文
PKE=DB1.DBW 0=50C8
IND=DB1.DBW 2=0180
PWE1=DB1.DBW 4=0001
PWE2=DB1.DBW 6=0000

圖5
(3) 浮點數:修改參數P2240[1]為40.0,見圖6。
修改參數請求報文
PKE=DB1.DBW 24=80F0
IND=DB1.DBW 26=0180
PWE1+PWE2=DB1.DBD 28=40.0
實際應答報文
PKE=DB1.DBW 0=50F0
IND=DB1.DBW 2=0180
PWE1+PWE2=DB1.DBD 4=40.0

圖6
修改和讀取2000以下參數方法:下面的圖中上部紅色框中為實際修改后的值,由功能塊SFC14讀回來,下部紅色框中為希望修改參數值的報文。
(1) 單字:修改參數P0701[0]為2,見圖7。
修改參數請求報文
PKE=DB1.DBW 24=72BD
IND=DB1.DBW 26=0000
PWE1=DB1.DBW 28=0000
PWE2=DB1.DBW 30=0002
實際應答報文
PKE=DB1.DBW 0=42BD
IND=DB1.DBW 2=0000
PWE1=DB1.DBW 4=0000
PWE2=DB1.DBW 6=0002

圖7
(2) 雙字:修改參數P1020[0]為1,見圖8。
修改參數請求報文
PKE=DB1.DBW 24=83FC
IND=DB1.DBW 26=0000
PWE1=DB1.DBW 28=0001
PWE2=DB1.DBW 30=0000
實際應答報文
PKE=DB1.DBW 0=53FC
IND=DB1.DBW 2=0000
PWE1=DB1.DBW 4=0001
PWE2=DB1.DBW 6=0000

圖8
(3) 浮點數:修改參數P1120[1]為40.0,見圖9。
修改參數請求報文
PKE=DB1.DBW 24=8460
IND=DB1.DBW 26=0100
PWE1+PWE2=DB1.DBD 28=40.0
實際應答報文
PKE=DB1.DBW 0=5460
IND=DB1.DBW 2=0100
PWE1+PWE2=DB1.DBD 4=40.0

圖9
6、非周期DP通訊讀取和修改參數例程
方法一:使用SFB52/SFB53對MM440進行非周期DP通訊讀取參數時必須要成對出現,即先發送讀請求塊SFB53,然后發送SFB52塊讀取參數;而修改參數只需要發送功能塊SFB53就可以。功能塊中ID的地址可以設置為PZD或者PKW的地址,也可以設置為診斷地址,本例中設為診斷地址W#16#1FFA;功能塊中INDEX必須為47;建議功能塊中LEN和RECORD的長度*,或者RECORD的長度大于LEN的長度,只要小于240字節即可,見圖10。程序中先置M0.0為1發出讀請求,然后程序自動把M0.0復位為0;再置M0.1為1進行讀取參數,M0.1也自動復位為0。

讀請求 讀參數
圖10
方法二:使用SFC58/SFC59對MM440進行非周期DP通訊讀取參數必須要成對出現,即先發送讀請求塊SFC59,然后發送SFC58塊讀取參數;而修改參數只需要發送功能塊SFC59就可以。功能塊中LADDER的地址可以設置為PZD或者PKW的地址,也可以設置為診斷地址,本例中設為診斷地址W#16#1FFA;功能塊中IOID必須設置為B#16#54;功能塊中RECNUM必須為B#16#2F,即十進制必須為47;程序中先置M2.0為1發出讀請求,然后程序自動把M2.0復位為0;再置M2.1為1進行讀取參數,M2.1也自動復位為0,見圖11和圖12。
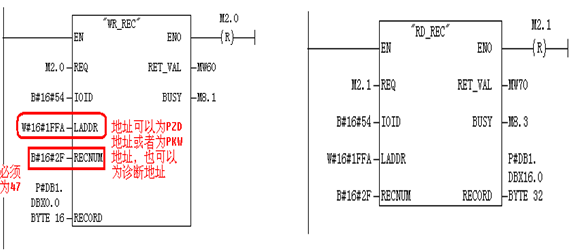
讀請求 讀參數
圖11
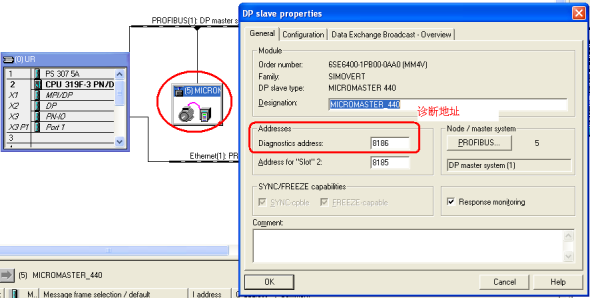
圖12
(1)一次讀取參數P1120的三個下標值和P1121的三個下標值,報文結構說明見圖13,其中DB1.DBB 2(驅動單元ID號碼):可以取值為0或1或2。實際設置見圖14。

圖13
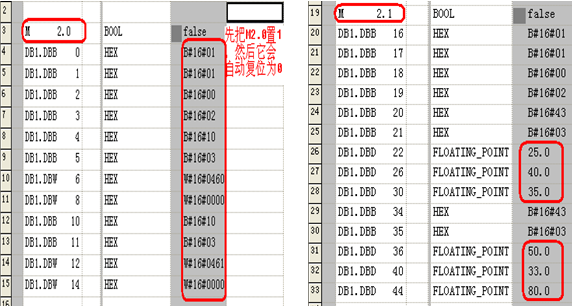
讀請求 讀參數
圖14
(2)單字:修改參數P0701的三個下標值均為9,主程序調用功能塊SFC59,見圖15,M3.1置后則自動復位為0。實際修改參數見圖16。STARTER軟件中參數P0701的三個下標值均被修改為9,見圖17。

圖15

圖16

圖17
(3)雙字:把參數P2200的三個下標值都修改為1,實際修改參數見圖18,STARTER軟件中參數被修改為1,見圖19。
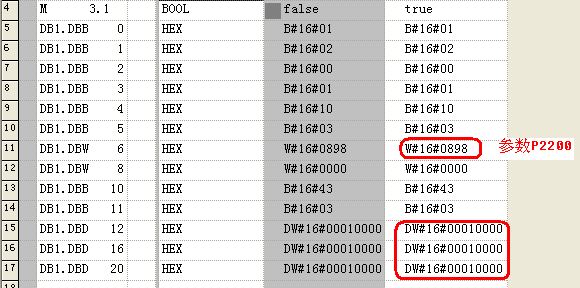
圖18

圖19
(4)浮點數:把參數P1120的三個下標修改為11.0/7.0/30.0,實際修改參數見圖20,STARTER軟件中參數被修改為11.0/7.0/30.0,見圖21。

圖20

相關產品




